时间:2022-07-29来源:燕青谈齿轮 作者:麻俊方
什么是通用的高减速比传动?
高减速器的职责是将高输入转速降低到低转速输出,例如推动车辆的车轮或直升机的旋翼。这种传动的输出转速在0和1000 rpm两者之间。输入转速可以是20,000 rpm或更高,原动机是电动机或燃气发动机。
可以实现高输入速度运行并能实现高减速比的传统传动方式有:
采用圆柱齿轮的多级变速器;
单级减速比为20的锥蜗杆减速器;
带章动锥齿轮的周轮式传动装置;
摆线传动。
采用圆柱齿轮的多级变速器。带圆柱齿轮的多级变速器需要多种带轴承和齿轮的轴。对于20的减速比,至少需要4级减速。四级减速需要4个轴,8个轴承和4个齿轮啮合。单级效率为99.4%时,仅对4个齿轮啮合进行观察,总效率为97.6%(0.9944=0.976)。四级圆柱齿轮减速变速箱需要一个相当大的变速箱外壳。
单级减速比为20的锥蜗杆减速器。锥蜗杆减速器又称为高减速比锥齿轮减速器(HRH)或者高减速比准双曲面齿轮减速器(SHR)。主动轮的齿数一般为1-5,被动轮齿轮一般为25-75之间,最大的可达速比为75。在75的范围内。高于15的速比只会降低反向承载能力。没有反驱动能力的齿轮组是自锁的。自锁齿轮组不能在车辆传动系或在直升机主旋翼传动中使用。锥齿轮蜗杆传动也由于在面宽方向的较高滑动速度无法使用。一个5齿的SRH小齿轮,与一个60齿的被动齿轮啮合,以10000 rpm的小齿轮转速(等传动输入速度)在齿面之间可以创造出617m/min的相对滑动。这比准双曲面齿轮驱动跑车在齿轮转速为4000转/分钟、速度超过200公里/小时(125英里/小时)的情况下的最大滑动预期值要高。实例说明,增加一倍的传动输入不仅会降低效率,而且会有表面损坏和过早失效的风险。
带章动锥齿轮的周轮式传动装置。带章动锥齿轮的周轮式传动装置变速箱可以在20到100的范围内实现非常高的速比,而不会产生很高的相对表面滑动。当两锥齿轮之间的轴角接近180°时,相对滑动速度下降到零。因为在最常见的周周轮传动中,轴角高于160°,所以相对滑动速度并不重要,即使输入速度为20,000 rpm或更高。周轮传动装置的螺母部件有角度轴承座,应用在角度轴承座上的应力必须由预加载圆锥滚子轴承来支撑。另一个可能注意的领域是,周转轮传动章动部件是波动轴质量的力量来源。高速周周轮传动需要一个镜像,同时安排一个偶数的章动部件以及精确的齿轮定时和精确的平衡。
摆线传动。摆线传动是圆周轮传动的二维简化。偏心输入轴转一圈,输出轴就会转一到两个径节。摆线轮传动的径向质量力不能由并排布置的第二个摆线轮来补偿。因此,高速比摆线传动机构使用时,低输入速度造成了非常低的输出速度。
如果要达到10和100之间的高传动比,设计师更喜欢多级圆柱传动,通常结合行星减速器。多级传输在工业中得到了广泛的应用,提供了合理的功率密度。
对于未来的高速比减速器,我们希望制造一种非常紧凑的高速比减速器,具有易于制造的零件和可预测的运行条件。如果所涉及的零件都是众所周知的标准机械设计部件,那么使用AGMA、ISO等国家标准提供的计算算法,就有可能对耐久性和耐久性寿命进行预测。这些算法依赖于成千上万的疲劳寿命测试以及许多已经评估了几十年的应用因素。在安全工程中,那些经过验证的算法和应用因素是工程师最有价值的工具。
汽车差速器简介
新的发展是基于实现两个嵌入的差速器的想法,其中两个外侧齿轮之一连接到壳体上,内侧和外侧与之相对的两个齿轮分别与其相对应的齿轮啮合。差速器是行星传动从二维到三维的扩展,在行星齿轮中,有可能达到特定的速比,例如通过连接内部齿轮到太阳齿轮或通过连接内部齿轮到外壳的齿数变化。
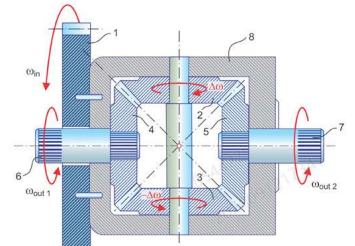
图1 标准差速器
标准差速器的功能可以用图1解释。输入旋转通过壳体8从最终驱动齿轮1传输到两个行星2和3。行星2和3将旋转传递给分别连接到输出轴6和7的两个齿轮4和5。在车辆的最常见的应用中,齿轮4和5通过输出轴6和7将动力传动到车轮。
如果两个车轮牵引力相同而两个轮子有相同的直径,四个齿轮之间将没有相对运动(2、3、4和5 )(w = 0),输入扭矩平均分配到两个输出轴6和7上,转速相同。当车辆轨迹为一条曲线时,曲线外部的车轮(例如轴6)必须有一个较长的行程,而曲线的内部的车轮(如轴7)行走的距离较短。这样就需要差速器中的星星齿轮旋转来获得差速功能,差速后的左右车轮转速为w+w及w-w,适应曲线驾驶条件,无车轮滑移或牵引力损失。
如果四个差动齿轮的齿数相同,则行星的旋转完全为w(如,上齿轮沿CW方向旋转,下齿轮沿CCW方向旋转)。
差速器可根据需要自动调节速度补偿,使其成为一个“智能”机械单元。如果在驱动速度win恒定的情况下,7轴不能在与6轴保持相同牵引扭矩的情况下使用win旋转,则7轴需要较低的转速wout2= win - w。反过来,6号轴需要更高的速度。为了保持与7号轴相同的牵引力力矩,必须更快地旋转。行星轮2和3将自动开始以正负w旋转,以保持6和7轴之间的扭矩平衡。差动变速器被认为是行星变速器的三维版本。
什么是双差速机构?
Gleason为低、中、高功率密度的传动和标准设计单元的应用开发的新解决方案是双差速机构,如图2。
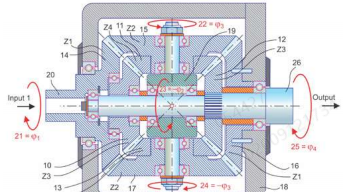
图2 双差速机构
双差速传动是对称的,具有很高的功率密度。从轴20的输入扭矩21被传送到齿轮15和17,导致齿轮15带动22和齿轮17带动24旋转。齿轮15和17都与齿轮16啮合。齿轮16刚性连接到壳体18。事实上,齿轮16不能旋转将导致23带动壳体19旋转。齿轮15和11以及齿轮17和13相互旋转约束,例如通过花键连接。该壳体23的旋转给出了第一个零件的旋转,以输出齿轮12。22和24的旋转带动输出齿轮12增加了第二个旋转分量。如果所有8个涉及的锥齿轮有相同的齿数,那么输出轴25的旋转将是零。其原因是,如果壳体19的90度旋转将使15和17在22和24方向上旋转90度。因此,输出齿轮12接受了一个壳体的90度旋转和在相反的方向从齿轮11和13的90度旋转,因此不会旋转,独立于输入轴21。
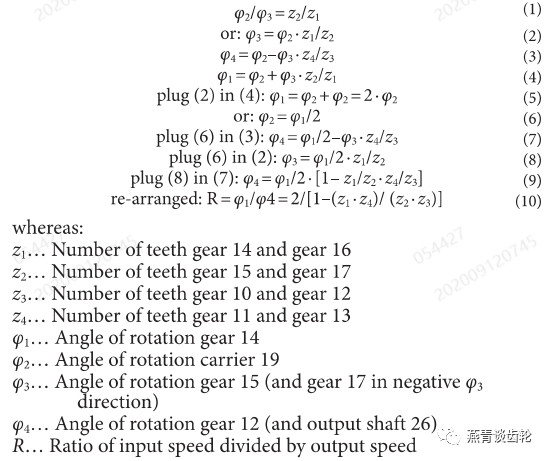
通过使用单个齿数对比值方程的推导,可以通过改变齿轮的齿数(14/16)找到可能的 15/17 和 10/12 对 11/13比值变化。各齿轮齿数和转速之间的关系如下:
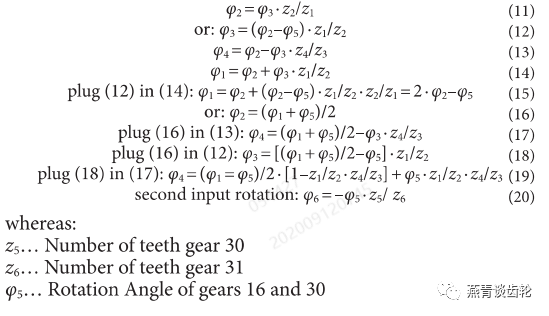
在以下四个例子中,使用了不同数量的齿数组合来演示在不显著改变传动尺寸的情况下,双差速器可以实现极高的比率范围:
标签: 减速器
上一篇:数控成形磨齿机热特性优化
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号





 网站客服
网站客服