时间:2022-10-13来源:机电工程
采用建模和有限元仿真方法来计算数控强力刮齿加工中的切削力时,存在较为耗时且复杂的问题,提出了一种基于dexel离散几何建模的切削力预测方法。首先,构建了强力刮齿的运动学模型,并将其应用于dexel实体造型中;然后,提取了三维未变形切屑形状,并通过狄洛尼三角剖分得到了二维切屑横截面;接着,通过计算离散化刀刃上的切削速度确定了其有效的前角和倾角,并使用斜角切削模型进行了切削力预测;此外,采用部分工件建模和叠加估算了整个过程的切削力,以便提高仿真效率;最后,在NT5400DCG车铣床上对所提出的预测方法进行了实际的验证。研究结果表明:相比于现有方法,所提方法的计算效率和预测准确率均得到了提升,切削力预测均方根误差降低了约7N,准确率提升了约9.7%;该方法有利于预防刀刃的早期疲劳破坏,从而为圆 柱齿轮的高质量强力刮齿加工奠定基础。
不同于传统的滚齿和插齿加工,数控强力刮齿加工是一种高速通用齿轮加工方法,可以进行内齿轮、外齿轮、直齿轮或斜齿轮的加工,且加工时间较短。随着数控技术的不断进步,刀具寿命、振动和伺服同步等过去阻碍其推广的问题,在近几年逐渐被克服,使得强力刮齿加工技术开始受到齿轮加工行业的极大关注。
然而,由于数控强力刮齿加工过程中存在着的几何和运动学复杂性,给其分析建模和仿真带来了较大的挑战性。GUO E 等人对强力刮齿刀具的设计问题进行了研究,并提出了一种简化的合力仿真计算方法;TACHIKAWA T 等人将归一化切削力的谐波分量与过程切削速度相关联,提出了一种可避免结构振动的建模方法;为了处理几何学和运动学的复杂性,KLOCKE F 等人采用了一种平面交点的方法,来数值逼近每个时间步长的刀具工件啮合。
近期,TAPOGLOU N 等人使用基于 CAD 的仿真模型来计算强力刮齿中的未变形切屑和齿轮几何。虽然该方法在切削力预测的精度方面能够满足需求, 但是每次预测均需要重新校准切削系数,且该方法所需的计算量较大。
因此,笔者采用 dexel 离散几何建模方法,设计出一种新颖的强力刮齿切削力预测方法,构建圆柱齿轮强力刮齿的运动学模型,并将其应用于基于 dexel 的实体造型中,将二维切屑形状与斜角切削模型相结合,来预测每个时间步长的切削力; 为了提高其仿真效率,采用部分工件建模和叠加来估算整个过程的切削力;最后通过强力刮齿实验,以验证该预测方法的可行性和有效性。
一、强力刮齿运动学模型
以直齿圆柱齿轮为例,强力刮齿的运动学模型如图 1 所示。
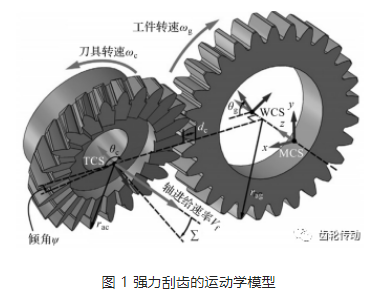
图 1 中,刀具围绕机床坐标系( machine coordinate system,MCS) 的 x 轴以交叉轴角∑ 定向。当刀具沿工件的 z 轴方向以恒速vf 轴向进给时,刀具和工件之间通过相对旋转,完成切削运动;在每一次加工过程中,刀具以指定的深度 dc 径向定位到工件中。围绕 MCS 的 y 轴定义的倾角 ψ 也可以应用于刀具,用于齿形修整或提供额外的间隙。
由于刀具的旋转速度是基于刀具工件齿轮比而建立的,该齿轮比是齿轮齿数和刀具齿数的函数。
对于具有类似运动的斜齿轮而言,根据刀具的节圆半径和轴向进给速度,其所需的螺旋角会产生额外的旋转项,即:
 式中: ωc—刀具的转速;ωg—工件的转速;Ng—齿轮齿数;Nc—刀具齿数;βg—齿轮螺旋角;rpc—刀具节圆半径;vf—刀具沿工件 z 轴轴向进给的速率。
式中: ωc—刀具的转速;ωg—工件的转速;Ng—齿轮齿数;Nc—刀具齿数;βg—齿轮螺旋角;rpc—刀具节圆半径;vf—刀具沿工件 z 轴轴向进给的速率。
为了与刀具工件啮合计算所需的 dexel 模型兼容,有必要在工件坐标系( workpiece coordinate sys- tem,WCS) 中建立强力刮齿运动学模型。
由于刀具几何形状是在刀具坐标系( tool coordi- nate system,TCS) 中定义的,此处应用了齐次变换的乘积,包括单个旋转 R 和平移 T,如下所示:
式中:Rz,-θg—齿轮绕其 z 轴反向旋转 θg;Rz,θc—齿轮绕其 z 轴旋转 θc;Tg→c—MCS 中从工件到刀具的平移;Tc→racRy,ψTrac→c—刀具按照角度 ψ 的倾斜。
在工业实践中,通常将切削速度定义为 vc≌ωcrpc。然而,实际切削速度的大小和方向会在刀刃上表现出明显的变化,从而导致其局部倾斜的接触条件不断变化。因此,需要精确求解切削速度矢量。
对于刮刀上的给定点 P,其位置为 rP/c ( 相对于刀具) 和 rP/g ( 相对于工件) ,可以使用速度矢量在 WCS 或 TCS 中找到真实切削速度,即:
式中:wc—刀具的转速矢量;wg—工件的转速矢量;vf—刀具沿工件 z 轴轴向进给的速度矢量。
二、强力刮齿预测方法
未变形切屑形状预测
笔者采用基于 dexel 的实体造型系统 ( Module- Works) 对所设计强力刮齿运动学模型进行了实现。工件由平行线段阵列表示,这些线段的起点和终点描述了材料的外表面。
刀具形状用三角面网格来描述,刮刀的三角形网格表示及其切削形状如图 2 所示。
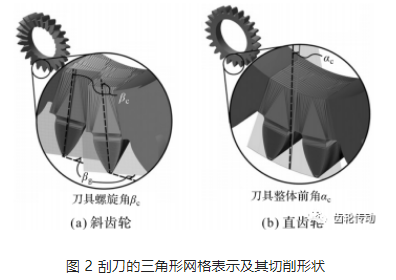
笔者通过定义刀具相对于工件的位置和方向( 姿势) ,以离散的时间步长执行切削;在当前工件的每个时间步长中,对扫描的切削体积进行布尔相减,生成更新的工件几何形状。
基于 WCS 的 dexel 强力刮齿仿真如图 3 所示。

从以 dexel 表示的 CWE 中提取二维切屑形状的方法,如图 4 所示。
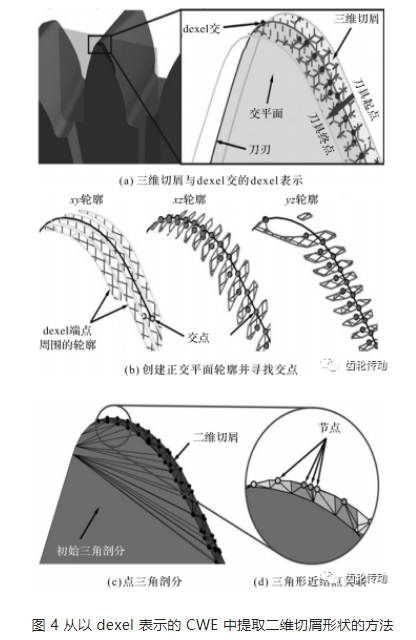
图 4 中,三维未变形切屑形状的 dexel 表示用于构建二维切屑横截面;笔者通过连接平行 dexel 的端点来估计切屑三维边界,有效地在 dexel 数据的每个 xy、 xz 和 yz 平面周围创建轮廓;然后,轮廓与刮刀的平面或圆锥前刀面相交,产生切屑横截面的二维点云。
笔者采用狄洛尼三角剖分和 alpha shape 算法,得到最终的二维未变形切屑形状。alpha shape 算法的阈值是 ,其中:d—dexel 分辨率。
,其中:d—dexel 分辨率。
刀具刃口被离散为多个点( 称为节点) ,这些点是在半时间步长时,刀具姿势处定义的。然后,笔者将切屑形状的三角形与最近的节点关联,每个三角形的几何形状用于计算其关联节点的局部切屑面积 a;最后,在每个节点上应用斜切削力模型,以获得每个时间步长的切削力预测。
切削力计算
本文将二维切屑形状与斜角切削模型相结合,以预测每个时间步长的切削力。对于与切屑形状相关的每个节点,在切向 t、进给 f 和径向 r 方向上产生的力增量分量 Ft、Ff 和 Fr 分别可以表示为:
式中: Ktc,Kfc,Krc,Kte,Kfe,Kre—通过试验确定的切削力系数。
切向 t、进给 f 和径向 r 方向的矢量必须在 TCS 中解析,以便正确定位式(4) 中它们对应的力分量。这是通过考虑每个节点的局部几何形状和切削运动学来实现的,具体遵循文献中详细描述的刨齿操作过程,该方法适用于强力刮齿。
用于刀刃的斜角切削模型如图 5 所示。
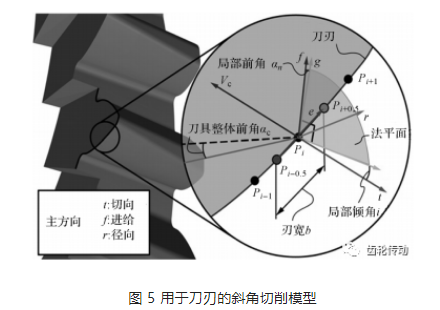
该过程考虑了刀具的整体前角 αc、局部刀刃形状 ( Pi-1,Pi,Pi+1 ) 和每个节点处的切削速度矢量 vc,还计算了刀刃上任意点的有效局部前角 αn 和倾角 i。
将计算出的切削力方向矢量与式(4) 中的力大小相结合,可获得每个节点的切削力矢量;合并来自当前时间步长的所有参与节点的力矢量,从而预测其瞬时总切削力。
通过叠加提高仿真效率
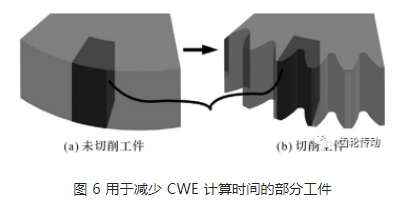
CWE 计算是仿真中计算量最大的任务。因此,为了提高仿真效率,本文提出只对部分工件进行建模,并通过叠加切削一个齿隙所需的力,来估算整个过程的切削力。
用于减少 CWE 计算时间的部分工件如图 6 所示。
通过部分工件仿真重建 y 轴切削力的方法如图 7 所示。
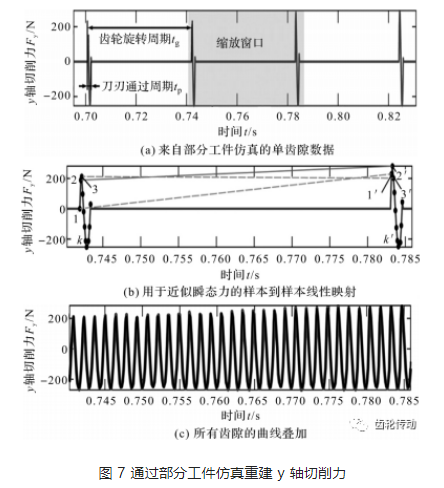
图 7(a) 中,切削该齿隙的 CWE 和力曲线预测计算,是在多个由齿轮旋转周期 tg = 60 /( 2πωg ) 隔开的刀刃行程中完成的。
图 7(b) 中,由于逐渐变化的啮合条件,本文采用连续力曲线之间样本到样本的线性映射,来捕获影响切削力的瞬态效应。
图 7(b) 对应图 7(a) 中缩放窗口,覆盖单个齿轮的旋转周期。该映射用于正确缩放和调节来自剩余 Ng-1 齿隙加工的期望作用力,刀刃的通过周期 tp = 60 /( 2πωcNc) ;最后,通过叠加每个齿间隙加工时预测的各个力曲线,估算出图 7(c) 中 MCS 中的总力。
由于本文没有通过整个工件形状来预测切削力,而是采用部分工件仿真法,笔者将仿真时间进行有效缩短,可以大大提升其计算的效率。
三、实验与结果分析
在德马吉 NT5400DCG 车铣床上,笔者对所提的强力刮齿预测方法进行验证。
其中,切削力的测量是通过德国 SPIKE 无线传感刀具夹头来进行的。该夹头使用位于不同位置和方向的多个应变片进行应变分析,并融合传感器以产生轴向力、扭矩和弯矩数据;采样频率为 2.5kHz,刀刃的通过频率(1/tp ) 为 322.38 Hz。
该测量实验装置的实物图如图 8 所示。
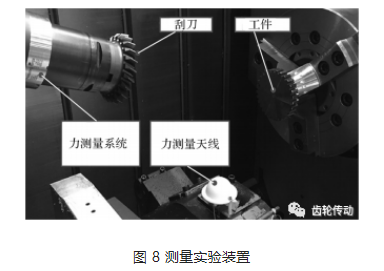
该测量实验装置中,刀具为 AlCrN 涂层高速钢刮削刀,工件材料为 AISI4340 钢。
工件和刀具参数如表 1 所示。

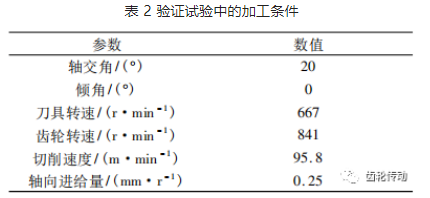
验证试验中的加工条件如表 2 所示。
在仿真过程中,笔者利用 CutPro 加工仿真软件中适用于 AISI4340 的 Kienzle 切削力模型,并根据有效的局部前角 αn 和倾角 i,计算出了每个切削节点的系数 Ktc、Kfc、Krc。
笔者使用具有通带频率 fp =1/tp +1/tg + 5 Hz 和阻带频率 fs =1/tp +1/tg + 10 Hz 的切比雪夫低通滤波器,对 x 和 y 轴上 SPIKE 刀具夹头的数据进行了滤波,使用采样窗口大小为 10tp 的移动平均滤波器对 z 轴数据进行了滤波。
笔者将采用该方法所获得的预测结果与 TCS 中的测量结果进行了比较,其对比结果如图 9 所示。
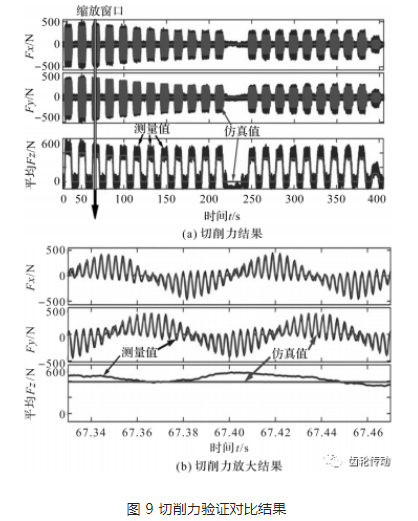
从图 9 可以看出:笔者所提的强力刮齿预测方法 x、y 轴的切削力预测结果与测量结果几乎完全一致,z 轴上结果也差别较小,可以准确地预测切削力;该方法无需重新校准切削系数,简化了切削力预测的复杂度。
此外,在相同实验条件下,笔者将所提的强力刮齿预测方法与 TAPOGLOU 等人所提的基于 CAD 仿真模型的强力刮齿预测方法进行了对比。
两种方法的切削力预测性能对比如表 3 所示。
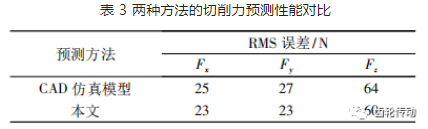
表 3 中,均方根( root mean square,RMS) 误差是以每个轴上的峰值切削力( x: 544.3 N;y: 443.5 N;z: 605.9 N) 进行归一化表示的结果。
从表 3 可以看出,相比与基于 CAD 仿真模型的预测方法,笔者所提预测方法的 RMS 误差平均降低了 7 N,切削力预测准确率提升了约 9.7% 。
四、结束语
在数控强力刮齿加工过程中,因采用建模和有限元仿真计算其切削力较为耗时、复杂,为了解决这一个问题,笔者基于 dexel 离散几何建模,提出了一种用于预测强力刮齿加工中切削力的新方法,并在切削试验中对该方法的使用效果进行了验证。
研究结果表明:
(1) 与现有方法相比,采用部分工件仿真结合叠加法,提升了计算效率;
(2) 在不重新校准切削系数的情况下,x、y 轴和 z 轴上的切削力预测结果与测量结果非常吻合;
(3) 切削力预测 RMS 误差平均降低了 7 N,即准确率提升了约 9.7% ;该结果为进一步预防刀刃的早期疲劳破坏,优化强力刮齿工艺参数提供了更加精确的理论依据。
然而,目前该方法还存在不能仿真工具/工件振动的局限性。因此,在后续的工作中,笔者将针对该问题开展进一步的研究,并测试不同工艺参数组合对其的影响。
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号










 网站客服
网站客服