时间:2025-02-12来源:汽车实用技术
摘要:文章以小齿轮电动助力转向(P-EPS)系统为对象,目前电动助力转向系统的建模与仿真研究多是建立在数学模型上,与实际模型相比,数学模型往往忽略了实际参数影响与实际系统有较大偏差。结合目前电动转向系统控制策略已有研究基础,采用 AMESim 半物理仿真软件建立了 P-EPS 系统的物理模型,并提出一种适合该系统的三控制两补偿的控制策略,结合所搭建半物理模型进行了仿真研究,验证了其正确性和可行性。结果表明,应用 AMESim 搭建的 P-EPS 控制性能效果良好且易于实现,为 P-EPS 控制策略的进一步开发提供了参考依据。
随着汽车技术的发展和电力电子器件技术的成熟,电动助力转向系统作为现代汽车的关键技术之一受到越来越多的关注。小齿轮电动助力转向(Pinion Electric Power Steering, P-EPS)系统以其结构紧凑、响应迅速、助力效果好等优点,在车辆中得到了广泛应用,然而,P-EPS 的性能受到多种因素的影响,如:车速、方向盘转角、驾驶员力矩等,因此,搭建适合的仿真模型来研究 P-EPS 有效控制策略,对于提高系统的性能至关重要。AMESim 作为一款强大的工程系统仿真软件,建模过程中用户不需要去推导复杂的数学模型,通过软件内包含多种基本元素结合实际物理系统搭建自定义仿真模型即可,为 P-EPS 仿真建模和控制策略研究提供了有力的工具。
陈迎燕等利用 MATLAB/Simulink 构造了 EPS 仿真模型,采用了模糊比例-积分-微分(Proportional-Integral-Derivative, PID)自整定助力电流控制策略,提高了操控灵活性。刘小云等针对车辆行驶跑偏问题,提出了电动助力转向拉拽补偿对跑偏的优化方法并行了效果测试。商显赫等结合 CarSim 和 MATLAB/Simulink 建立整车联合模型进行仿真,通过和传统 PID 控制策略对比,在响应速度和超调量方面实现了更好的控制效果。本文采用 AMESim 搭建了 P-EPS 系统的仿真模型,设计了一种三控制两补偿的控制策略并进行了仿真试验,控制策略效果验证了其正确性和有效性。
1、P-EPS 系统和仿真模型
P-EPS 系统工作原理
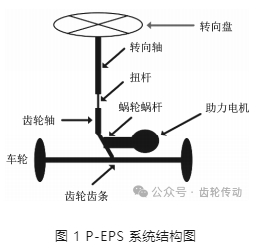
电动助力转向(EPS)系统通过电机提供转向辅助动力,电子控制单元(Electronic Control Unit, ECU)根据车速和驾驶员施加在转向盘上的力计算出目标辅助力矩,通过电流直流指令给到助力 电机输出力矩,使得 EPS 系统实现低速转向轻便性,保证高速转向稳定性。P-EPS 系统是一种电机及减速器与转向器上的小齿轮相连接的 EPS 系统,由机械和电子两部分组成。机械部分包括转向盘、转向轴、扭杆、减速增扭的涡轮蜗杆机构、带动车轮偏转的齿轮齿条机构等,电子部分由 ECU、助力电机、车速传感器、角度传感器、扭矩传感器等组成。其简化结构图如图 1 所示。
AMESim 仿真模型与调试
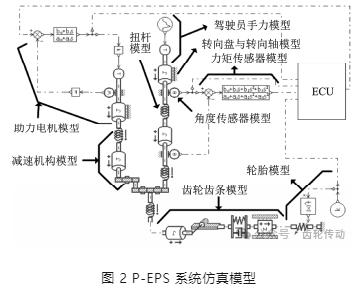
AMESim 是专门为流体(液体及气体)、机械、控制、电磁等工程系统开发的一款较完善的综合仿真环境,具有完善的机械、电机和控制信号元件库。针对 P-EPS 系统结构组成和 AMESim 软件中的已有元件搭建了合适的 P-EPS 系统仿真模型,如图 2 所示。
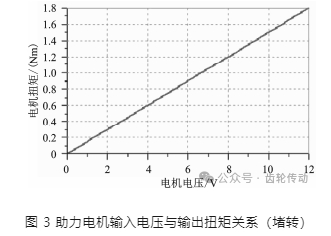
为验证所搭建模型的正确性,分别选取模型的机械部分中齿条齿条机构和电子部分中助力电机进行测试。当电机堵转时,随着助力电机输入电压变化输出扭矩也随之改变,输入与输出基本呈现正相关关系,检测电机电压与扭矩关系如图 3 所示,测试结果与实际情况相符。
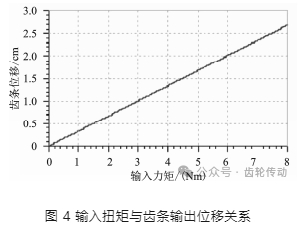
通过转向盘与转向轴模型输入线性扭矩,在无其他外界输入情况下检测齿轮齿条位移与输入扭矩关系如图 4 所示,测试结果表明齿条输出位移随输入扭矩正比例增大,考虑转动惯量与摩擦因数影响,输入扭矩与齿条输出位移和实际情况基本相当。
2、P-EPS 控制策略的设计
汽车助力转向系统辅助驾驶员在不同车速下控制车辆运动方向,传递不同路况和车速条件下的路感信息,设计良好的控制策略是体现 P-EPS 性能的关键因素。P-EPS 系统目标是根据车辆速度、转向盘力矩大小、转向机角度变化快慢等输入信号不同,控制助力电机输出准确的扭矩,实现车辆转向的舒适、稳定和安全。P-EPS 的控制对象为助力电机的扭矩输出,而电机所输出电磁转矩的大小与电枢电流成正比,因此,助力电机转向扭矩的控制实际为电机目标电流控制,包括常规助力控制、主动回正控制和阻尼补偿控制。
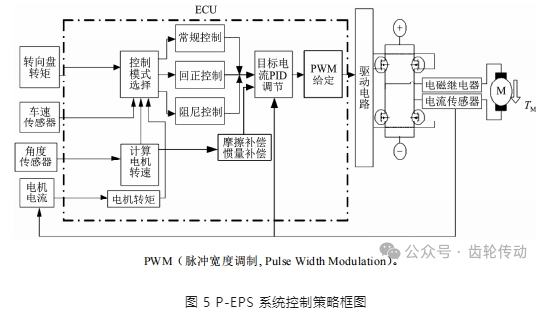
为减小助力电机目标电流和实际工作电流误差,提高系统稳定性和响应速度,控制电流采用增量式 PDI 闭环电流前馈控制,考虑实际转向时的转动惯量和摩擦因数,助力电机目标电流前馈补偿分别为转动惯量补偿电流和摩擦补偿电流,通过电流反馈能够实现助力电机依据助力特性连续稳定出力,改善电机响应速度,使得助力电机平稳助力,保持稳定回正。综合 P-EPS 工作原理及所设计的三种控制两种补偿的控制策略,P-EPS 控制框图如图 5 所示。
3、控制策略仿真及结果分析
在所搭建的 P-EPS 仿真模型的基础上,对所提出的控制策略进行仿真研究。车辆转向助力实际控制过程中存在很多非线性因素,例如路况、负载扰动、驾驶习惯差异等因素影响。基于 AMESim 仿真模型研究与测试结果与实际的真实情况会存在部分误差,但仿真研究成本低速度快且可实施性强,对于实际试验提供了借鉴和参考价值。
常规助力控制
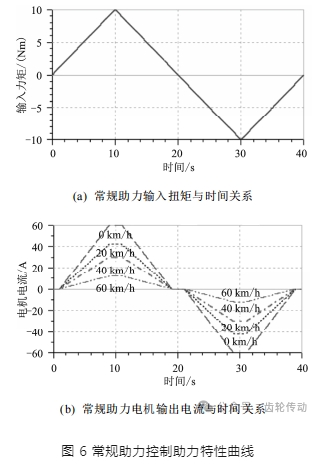
常规助力控制是车辆转向过程中的基本控制模式,助力电机输出的助力扭矩是通过助力特性曲线来确定的。助力特性曲线将车速、转向盘转矩大小和电机输出扭矩的关系表示出来,由于电机输出扭矩大小与电机输入电流有一定关系,且随着车速变化也随之发生变化,因此,采用电机电流与车速、转向盘扭矩的关系表示助力特性,仿真结果如图 6 所示。可以看出助力特性曲线在不同速度下转向盘转矩与电机电流关系,在转向盘转矩在 1 Nm 及以下时助力电机没有电流,随着转矩增大电流随之平滑增大,没有发生突变,当转矩大于 8 Nm 时,电机电流饱和不再增大。
主动回正控制
设定车速为 0 km/h,测试将转向盘先向右转动90°待转向盘回正后再向左转动 90°回正后的转向盘转矩和电机电流关系,图 7 描述了助力电机主动回正控制时助力特性曲线。对比图 7(a)和图 7(b)在前 10 s 电机处于常规助力控制,第 10 s 进入主动回正控制电机电流变为 0,由于转向回正存在反向残余角度,电机根据角度传感器信号带动转向盘回中,因而存在小数值的反相电流。

阻尼控制
当快速转动转向盘时,转向输入扭矩很大和转向瞬间角速度很大,助力电机输出转矩也比较大。为了因为惯性作用造成的防止转向盘过渡旋转,需要对电机进行阻尼控制,改善车辆高速转向的稳定性,助力电机阻尼控制电机电流收敛情况如图 8 所示。可以看出在 1 s 的时间内迅速转动转向盘并突然停止,电机电流相应立即减小且产生反向电流促使转向盘迅速停止,有效防止了转向系统因惯性造成的超调,保证了系统稳定性。

摩擦和惯性补偿后效果
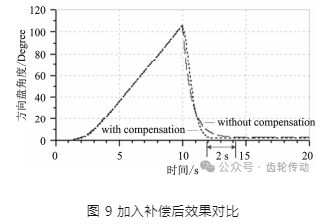
为了显示控制策略中添加摩擦和惯性补偿后对电机性能的提升效果,设置方向盘线型转动,在 10 s 时转动 105°然后对比加入两种补偿后回正和未采用主动回正控制的结果,如图 9 所示。由图 9 可以看到加入两种补偿后在第 12 s 时刻方向盘角度为零,而未添加补偿时在第 14 s 时刻方向盘角度才为零,说明加入摩擦和惯性补偿后电机在回正性能和响应速度上均有一定改善,转向时电机响应速度更快,在回正时有 2 s 的提升效果且残留角度更小。
4、结论
在总结目前电动转向助力系统系统仿真及控制策略研究基础上,对 P-EPS 展开研究工作,通过 AMESim 建立了 P-EPS 的半物理模型并对部分机械电子模型的正确性进行了测试,针对所提出的三控制两补偿控制策略进行仿真分析,测试结果表明所设计的控制策略达到了预期目标,表明了该仿真模型和控制策略的正确性和有效性,为台架或实车设计提供了参考依据。
参考文献略.
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号










 网站客服
网站客服