时间:2024-03-18来源:现代制造技术与装备
综述各种减速器国内外的市场现状,总结精密减速器的分类,介绍不同减速器的特点,指出了国内外产品的性能差距,最后分析了当前我国在精密减速器领域存在的技术壁垒及其以后的发展方向。
随着我国社会老龄化程度的加剧和工业产业的升级改造,我国对工业机器人的需求逐年递增。截至 2018 年,我国已经成为全球最大的工业机器人市场。从工业机器人构成结构上分析,完整的工业机器人包括减速器、伺服电机和控制器 3 大核心零部件。工业机器人制造产业的总成本表明:我国机器人 3 大核心零部件的占比分别为 32%、22% 及 12%,制造成本占工业机器人总制造成本的 70%。精密减速器作为工业机器人最重要的基础部件,直接关系到机器人的反应速度和功能实现精度,即精密减速器的性能直接决定了机器人的整体性能水平。
一、精密减速器的国内外发展现状
在工业机器人用精密减速器领域,国外企业起步早,技术积累时间久,而国内企业处于相对落后的状态。但是,随着国家政策和国内外环境的变化,国内精密减速器领域也取得了巨大进步。
国外发展现状
国外企业对于精密减速器领域的研究已有 100 多年的历史。经过 100 多年的技术沉淀和积累,在精密减速器的研发、设计与制造方面,国外企业一直处于垄断领先地位。不论是技术还是市场开拓,国内企业与之尚存在一定的差距。值得注意的是,目前的全球精密减速器市场中,日本企业占据了半壁江山。以 Nabtesco 生产的 RV 减速器为例,该企业的产品占据了全球 RV 减速器市场约 60% 的份额。此外,Harmonica 生产的谐波减速器和 SUMITOMO 生产的行星齿轮减速器也都在全球市场占据着重要份额。除日本外,韩国、美国及斯洛伐克等国家近几年不断进行各种技术创新,推出各种新型精密减速器产品,且研制的各种型号的精密减速器当前仍处于保密状态。总的来说,当前全球工业机器人用精密减速器市场仍是以欧美和日韩为主导的市场,且其技术一直在不断发展和更新。
国内发展现状
我国在工业机器人用精密减速器领域起步较晚,技术积累较为薄弱。自 20 世纪 60 年代谐波减速器技术引入我国之后,几十年的时间,我国的精密减速器行业从无到有,经过市场检验现已发展较为完备,具备一定的设计、研发及制造能力。特别是进入新世纪后,随着我国经济的发展涌现出了一大批精密减速器企业,其中比较有代表性的有上海机电、秦川发展、绿的谐波、南通振康和浙江恒丰泰等民族企业。近年来,这些企业与科研院所合作,在减速器设计方面有所建树,如减速器设计理论研究、减速器加工工艺研究及减速器整机性能测试研究等方面。虽然国内企业生产的精密减速器在精度及寿命上达不到国外企业的水平,但由于我国企业的价格优势明显,在国内及国际也占据了一定的市场。
目前,我国工业机器人精密减速器核心零部件严重依赖进口,精密减速器单项占总机的成本达到 30% 以上。由于核心零部件的成本过高,导致我国精密减速器行业及工业机器人行业的受到了一定阻碍。所以,国内企业应该立足当下,积极寻求与国外企业的合作,争取以合作共赢的方式弥补技术上的不足。
二、工业机器人用精密减速器的分类
RV 减速器
最早提出 RV(Rotate Vector)减速器概念的是德国 Braren 博士。1926 年,Braren 博士创造性地提出在精密机械传动中应用摆线齿廓,并在随后的几年开始批量生产和销售摆线减速器。RV 减速器日后在世界范围内大规模商业化推广应用,主要归功于日本的 Nabtesco 公司。该公司在研制适配机器人关节手臂的减速器时,首次正式将 RV 减速器的概念规模化,并在以后的生产实践中将其产业化。
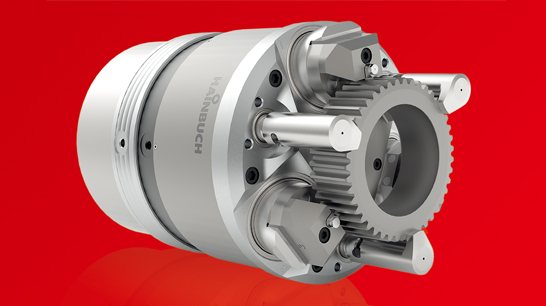
RV 减速器的实物图,如图 1 所示。从本质上来讲,RV 减速器是以摆线针轮行星传动为基础发展而来的工业机器人用精密减速器。按照行星轮系基本结构,可以将其归类为 2K-V 型行星传动装置。该减速器主要包括两级传动装置,分别为渐开线行星齿轮传动和摆线针轮行星传动。渐开线行星齿轮传动机构中包括行星直齿轮、偏心轴和中心轮,摆线针轮行星传动机构中包括摆线轮、偏心轴、针齿和行星架。

谐波减速器
谐波减速器是以行星齿轮传动为原理研制的精密减速器,主要包括波发生器、柔轮与刚轮,如图 2 所示。此类型减速器工作时,波发生器会发生可控变形,同时依靠柔轮、刚轮的啮合传递动力。谐波减速器中一般将谐波发生器作为主动轴,将柔轮与钢轮作为从动轴。谐波减速器不仅在工业机器人领域得到了应用推广,也在其他诸如航空航天、精密加工设备和医疗设备等行业得到了广泛应用。

精密行星减速器
精密行星减速器体积比较小,主要包括行星轮、太阳轮和内齿圈。精密行星减速器结构较为简单,传动比都在 10 以内,且减速级数一般不会超过 3 级。市场上认可度较高的精密减速器为德国 SEW 和 FLENDER。此外,国产四通精密行星减速器在我国也占有一定的市场。
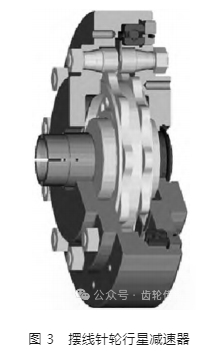
摆线针轮行星减速器
摆线针轮行星减速器是以应用行星式传动为基础、以摆线针齿啮合为载体的传动装置,如图 3 所示。与其他减速器结构类似,构成摆线针轮行星减速器主要分为输入部分、减速部分和输出部分。不同于其他减速器,摆线针轮行星减速器在输入端设有一个双偏心套,并在偏心套上配有两个滚珠轴承,构成了该减速器的 H 机构,并以此为基础组成了摆线针轮行星减速器种齿差为 1 的内啮合减速结构。摆线针轮行星减速器承载能力大,因此被广泛应用于如矿山、化工和起重等工程机械领域。
滤波齿轮减速器
滤波齿轮减速器由重庆大学的梁锡昌教授研发。该减速器属于 NN 型少齿差减速器,主要包括偏心减速机构、滤波花键机构和三向止推轴承。作为我国首款自行研制的精密加速器,滤波齿轮减速器的出现标志着我国在工业机器人用精密减速器领域取得了原创性突破,打破了国外企业在该领域的技术垄断,在精密减速器领域中国制造向中国“智”造转变过程中具有里程碑意义。
三、工业机器人用精密减速器的特点
RV 减速器的特点
与传统的摆线针轮行星传动相比,RV 减速器具有许多独特的优点。首先,RV 减速器采用两级传动结构,故其传动比的范围较其他结构的减速器更大,传动效率更高。根据测算,RV 减速器的传动比可在 31 ~ 171 范围内浮动,同时传动效率可达 85% ~ 92%。其次,RV 减速器低速级摆线轮结构为180°对称分布,使得摆线轮的结构受力均匀、啮合次数增加,提高了减速器传动的平稳性和减速器的承载能力。最后,RV 减速器采用两端支撑的输出结构,相比普通的摆线减速器,其刚性和耐过载冲击性能得到大幅度提升,传动精度与传动误差得到大幅优化。因此,RV 减速器在工业机器人用精密减速器领域应用广泛。
谐波减速器的特点
谐波减速器最突出的优点是可以在密闭空间内传递运动。此外,谐波减速器的运动精度高,质量和体积小,转动惯量小。多级谐波齿轮具有较大的传动比,在机器人中可以完成快速检测。但是,谐波减速器的缺点也较为明显。因为谐波减速器工作时柔轮每转一次就会产生椭圆变形两次,所以容易引起材料的疲劳破坏,并在工作时产生一定的传动误差。由于这一缺点,柔轮通常使用高强度材料,以提高其齿轮的负载能力。
精密行星减速器的特点
精密行星减速器在运行过程中一个太阳轮有 3 个行星轮绕转,所以其体积小、质量较轻,相较于其他减速器启动更加平稳,且刚性、精度和扭矩高。精密行星减速器的主要应用场合为步进电机和伺服电机,用以降低转速,提升扭矩。
摆线针轮行星减速器的特点
摆线针轮行星减速器是 K-H-V 型行星齿轮传动,属于少齿差行星齿轮传动。该类型减速器的单级传动比范围可达 6 ~ 110,传动效率为 0.90 ~ 0.95。相比于其他减速器,摆线针轮行星减速器可减少 2/3 的体积和 1/3 的质量。但是,摆线针轮行星减速器的结构复杂,精度要求高,生产成本高。此外,摆线针轮行星减速器转臂轴承易过载,影响整体的寿命和承载能力。
滤波减速器的特点
滤波减速器从结构上解决了谐波减速器中柔轮易变性、导致材料容易疲劳等缺点。它在运动过程中的传动精度高,传动扭矩大,具有更长的使用寿命,现已广泛应用于航空航天等领域。
四、主要性能指标
工业机器人精密减速器的性能指标可以分为静态特性和动态特性两部分。
静态特性
扭转刚度:扭转刚度指的是当扭转力矩作用于减速器构件时构件本身的抗变形能力,表示为:
式中:T2 是输出轴扭矩:θout 为输出角度。
传动效率:精密减速器输出轴实际输出功率与理论输出功率的比值为传动效率,表示为:
式中:T1、T2 分别为输入轴扭矩和输出轴扭矩;i 为减速器的传动比。
空程:输入轴由正向变为反转时,其转角滞后量为空程。
传动误差:传动误差指的是输入轴单向旋转时,输出轴实际输出角度与理论输出角度的差值。
启动扭矩:减速器输入轴开始转动时的瞬间力矩为启动扭矩。由于减速器在启动阶段会遇到摩擦力矩的限制阻碍其启动,只有当驱动力矩比减速器自身的摩擦力矩大时,减速器才开始运转。
背隙:当在精密减速器输入端添加一定量的额定转矩时,减速器的输入端会产生一个微小位移角,这个位移角就是背隙。背隙的存在会影响输入端的输出精度。
传动精度:减速器工作时,输入轴输入动力后,输出轴会存在实际转角和相对理论转角两个转角。这两个转角的接近程度就是传动精度,会影响整个减速器的正常工作。特别是在工业用精密减速器这种对精度要求高的应用场所,传动精度会影响整个系统的运转。
动态特性
固有特性:加速器齿轮系统最基本的动态特性是固有特性,具体来讲是指固有频率和振型。固有特性很大程度上会影响系统动载荷的产生与传递及系统的动态响应。
动力稳定性:精密减速器齿轮系统本质上是一种参数激励系统,因此不可避免存在动力稳定性问题。分析整个精密减速器系统的动力稳定性问题,可以明确稳定区和非稳定区,给整体的系统设计提供有力的参考。
动态响应:精密减速器齿轮系统的动态响应主要包括轮齿动态啮合力和齿轮动力的传递。减速器整体动态响应的研究可以大幅度降低系统的振动和噪声。
系统参数:减速器系统的结构参数、几何参数及其他的线性因素会对整个系统的动态特性产生重大影响。通过分析各类参数与系统动态特性的关系,可以为减速器齿轮系统的动态设计提供技术支撑。
五、我国精密减速器市场的分析
主要差距与不足
在工业机器人用精密减速器行业,我国与欧美和日韩等存在大约 20 年的技术差距。经过多年的发展,我们在取得成绩的同时应清醒地认识到自己在精密减速器领域的不足。国内企业生产的精密减速器的首要问题是精度差,整机精度保持能力弱,承载能力不足,工作时的噪声较大。此外,整个产业链的质量管理体系方面不够严谨。国外先进企业都有着严格的质量管理体系,生产和装配的各个环节都可以用整个体系进行严格的质量把关,以避免任何环节出现质量问题,从而保证最终产品的质量。反观我国各企业在质量管理体系中的检验、质检及生产各环节都存在不规范之处,需重视并予以解决。
发展思路与建议
工业机器人行业工业体系的建立和完善并非一朝一夕可以完成,正视缺点才能弥补不足。今后整个行业的发展需要从政府和企业两个角度进行分析与思考。
政府一方面要在宏观政策上继续加大对整个工业机器人行业和精密制造业的支持力度,充分发挥科研院所的科研优势,积极推动国有企业在“卡脖子”技术问题上攻坚克难。另一方面,政府应加大在贷款或金融领域对工业机器人行业的支持,同时在国家层面积极扩大合作,引进先进技术和管理体系,为工业机器人行业的发展创造良好的发展环境。
作为行业主体的企业,首先应当加大自身对技术研发的投入,增加理论技术研究,在理论领域追求创新。其次,企业应加大装备制造的投资,提升自主制造能力,改进工艺,提升产品质量,同时注重完善质量管理体系,以体系的形式保证产品质量。最后,企业应主动寻求与国外先进企业之间的技术合作与交流,通过借鉴国外优秀企业的经验与技术,完善自身的产品与体系。
参考文献略.
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号










 网站客服
网站客服