时间:2023-11-27来源:传感器与微系统
基于双目视觉测量系统开展面向齿轮的三维轮廓点云精确重构测量方法研究。针对齿轮的初始三维点云存在的噪点问题,利用直通滤波和体素栅格滤波去除离群点和冗余点;采用移动最小二乘法平滑加贪婪三角化重构算法进行了齿轮重构。搭建了双目视觉齿轮测量系统实验平台,通过测量实验对比分析了齿轮的三维重构效果及尺寸测量精度。结果表明:采用移动最小二乘法平滑加贪婪三角化重构后的齿轮三维模型比直接重构的齿轮表面光滑,边缘清晰,齿顶圆直径尺寸的测量误差由 0.833 mm 降至 0.544 mm,孔径加键槽尺寸的测量误差由 0.133 mm 降至0.106 mm,孔径尺寸的测量误差由 0.171 mm 降至 0.148 mm。
近年来,视觉测量因其高速、非接触等特点广泛应用于视觉定位、间距测量、尺寸测量等智能测量领域,其中包括齿轮的三维轮廓测量。目前,齿轮三维轮廓测量通常采用双目视觉技术实现齿轮的三维点云数据提取及模型重构,但该方法获取的齿轮初始点云往往离群点噪声大、冗余性高,容易造成齿轮的三维重构质量差、尺寸测量精度低等问题,继而影响齿轮的质量检测及其制造精度。因此,亟需研究基于视觉测量的三维点云数据提取及其重构测量方法,以提高齿轮的三维重构测量精度。
国内外学者对三维重构技术开展一系列研究并取得诸多成果。Hoppe H 等人提出了一种面向无序点云的曲面重构算法,实现了曲面目标模型的平滑拟合。Gopi M 等人研究了二维空间Voronoi图及Delaunay三角化,但该算法有较高的采样密度要求。Morel J 等人提出了一种基于先验模型的曲面重构算法,但该算法不适用于复杂的曲面模型重构。Wang W Y 等人采用 NURBS 进行了点云数据参数化与曲面重建,但其参数化后的重建效果受点云数据的散乱性影响。唐昀超等人提出一种基于双目视觉的齿轮曲面重构算法,但该算法更适用于封闭的三维模型点云重构。
针对上述研究现状及其存在的问题,本文首先利用双目视觉测量系统获取直齿圆柱齿轮的三维轮廓信息,分析并采用直通滤波和体素栅格滤波去除初始点云中的离群点及冗余点,通过除噪点减少数据处理量。然后采用移动最小二乘法平滑加贪婪三角化重构算法解决重构后表面粗糙、精度较低的问题。最后搭建双目视觉齿轮测量系统实验平台,利用提取的齿轮三维点云数据进行三维模型重构,并分析齿轮重构效果及尺寸测量精度。
一、齿轮三维点云数据的获取与分析
齿轮三维点云数据的测量原理
双目立体视觉测量系统的结构原理如图 1(a)所示,为了获取齿轮的三维轮廓点云信息,利用左、右相机分别采集目标的图像,根据左、右图像的视差计算点的三维坐标。双目视觉测量系统实验平台如图 1(b)所示,其设备主要包括 2 组黑白工业相机、焦距 f 为 16 mm 的工业镜头、可调数字光学扫描头、三脚架、齿轮、旋转台及计算机等。
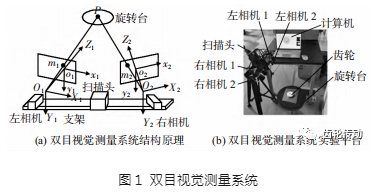
在图 1 中,两相机和扫描头水平放置,O1 -X1Y1Z1 与 O2 -X2Y2Z2 分别为左、右相机坐标系,o1 -x1 y1 与 o2 -x2 y2 分别为左、右图像坐标系,原点 O1 和 O2 分别为两相机的光心,O1Z1 和 O2Z2 为两相机的光轴。假设齿轮表面任意一 点 P 分别与 O1 、O2 连线,点 P 在平面 o1 x1 y1 和 o2 x2 y2 上的投影点坐标分别为 m1(x1 ,y1 )和 m2(x2 ,y2 ),将左相机的坐标系视为世界坐标系,则右相机可近似为一个单目相机模型,通过相机标定可获得相机的旋转矩阵 R 与平移矩阵 T。结合投影变换公式,可得到点 P 在世界坐标系下的三维坐标(X1 ,Y1 ,Z1 )如式(1)所示
式中 f 为相机焦距。
齿轮三维点云特点分析
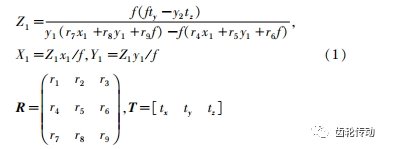
利用双目视觉测量系统获得的齿轮初始点云数据如图 2 所示,点云数为 2 974 257,且图中存在诸多离群点及冗余点。
根据上述齿轮初始点云数据,利用 Geomagic Control 软件直接重构的齿轮三维模型如图 3 所示,由图可知重构后的齿轮表面凹凸不平,并且存在许多孔洞。

通过上述齿轮初始三维点云数据重构结果分析可知,采用双目视觉系统进行尺寸三维模型重构时,需去除齿轮初始三维点云数据的离群噪点,并在保留表面信息的情况下去除冗余点云,保证重构后的表面更为平滑、孔洞更少,以提高齿轮尺寸的重构测量精度。
二、齿轮三维点云数据处理
点云去噪
为了提高齿轮的三维点云重构表面质量,本文采用直通滤波和体素滤波去除齿轮初始点云存在的离群点和冗余点等噪点。其中,直通滤波通过指定方向和值域来删除不在值域范围内的点,从而去除离群噪点。体素栅格滤波则在获取点云坐标后,求得 X,Y,Z 坐标轴上的最大值xmax, ymax,zmax和最小值 xmin ,ymin ,zmin。给定边长 v,则 X,Y,Z 坐标轴可以等分为 L,M,N 份,L =(xmax -xmin )/ v,M =(ymax - ymin )/ v,N =(zmax -zmin )/ v。
计算每个体素栅格的重心点,记为 cg,如式(2)所示, 每个体素栅格内只保留该重心点
式中 n 为体素栅格内数据点个数,pi 为数据点。经以上步骤,点云数据完成体素栅格滤波,去除了齿轮点云数据的大量冗余点云数据。
点云平滑
为了进一步提高齿轮三维模型重构精度及重构效果,本文采用移动最小二乘法进行点云数据平滑处理。建立拟合函数 f(x)如式(3)所示
权函数如式(4)所示,利用不同的基函数与权函数改变拟合曲面的光滑度与精度,从而完成点云数据平滑优化
其中,s =ri / βhi,ri =‖x -xi‖,hi 为节点 xi 的权函数影响域的大小,β 为影响系数。
点云重构
基于上述去躁与平滑处理后的齿轮三维点云数据,本文采用贪婪三角化方法进行齿轮三维重建。贪婪三角投影算法具体流程如下:
首先,构建 kd-tree 索引,获取种子点及 k 个邻域点的信息。其次,给定一点 M0(x0,y0,z0 ),任取平面上一 点M(x,y,z),可得 M0 M·n =0,该切平面方程如式(5) 所示
利用式(6)所示的投影矩阵 T∏ ,将区域中的三维数据点投射到二维切平面上,进行三角网格化
式中 Tc 为平移变换矩阵,Rx 为围绕 x 旋转 α 角度,Ry 为围绕 y 旋转 θ 角度。
最后,遍历完全部的数据点,最终形成齿轮的完整网格曲面。
三、实验验证
实验方案设计
为了获取齿轮的三维点云数据,验证本文基于双目视觉的齿轮三维点云重构方法的正确性与有效性。首先,搭建双目视觉测量系统实验平台,如图 1 所示,将齿轮置于旋转台中心,获取当前视角下的齿轮数据后,将齿轮旋转 45°直至旋转一周得到完整的齿轮三维点云信息;其次,根据获得的初始齿轮三维点云数据,采用直通滤波和体素滤波去除离群点和冗余点,完成点云降噪;然后,对比基于多项式平滑处理与移动最小二乘法 2 种方法下的齿轮尺寸测量精度,选用精度较高的方法进行点云平滑;最后,对比直接贪婪三角化重构、平滑贪婪三角化重构后获得的齿轮模型,分别选取易于测量分析的齿顶圆直径 D1、孔径加键槽尺寸 D2、齿轮孔径 D3 等尺寸进行测量精度分析,确定最佳的重构方法。
实验结果与分析
直接重构的齿轮测量误差分析:
为了分析直接重构的齿轮测量误差,对未经任何图像处理的齿轮初始三维点云数据直接进行重构和剖面截取,得到如图 4 所示的齿轮剖面图,并测量图中 D1、D2、D3 参数尺寸,结果如表 1 所示。
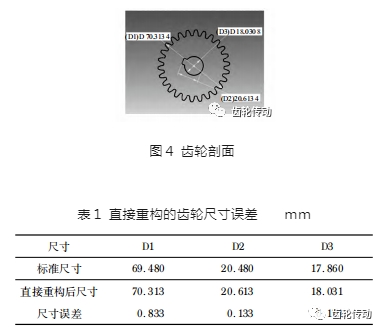
利用 50 分度值精密卡尺获得待测齿轮的 D1、D2、D3 标准尺寸,与直接重构尺寸进行对比,可知 D1 尺寸的测量误差为 0.833 mm,D2 测量误差为 0.133 mm,D3 测量误差为 0.171 mm。
滤波和平滑处理后的齿轮测量误差分析:
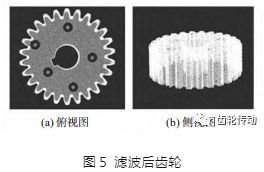
为了提高齿轮三维点云重构效果及其尺寸测量精度,利用 2.1 节中的直通滤波去除初始点云中的离群点,同时在保留特征的情况下采用体素栅格滤波去除冗余点。滤波后的齿轮三维点云结果如图 5 所示,初始点云数为 2 974 257,滤波后点云数为 215 999,由此可见,滤波处理可以在保留齿轮表面特征的同时精简齿轮的点云数据。
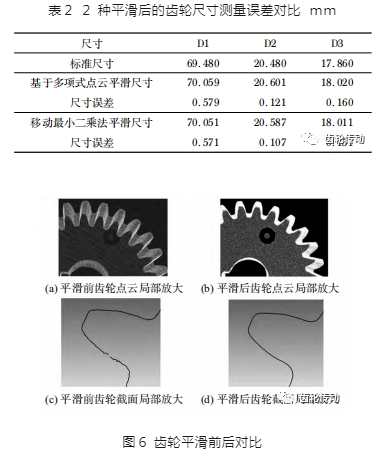
为了降低齿轮重构模型表面粗糙度并提高重构尺寸精度,分别采用基于多项式的平滑处理、移动最小二乘法平滑处理进行齿轮三维模型重构,获得的齿轮 3 个尺寸数据及测量误差如表 2 所示,经分析可知移动最小二乘法平滑后的齿轮尺寸误差较小。采用移动最小二乘法平滑后的图片如图 6 所示,经对比可知平滑后的点云相较于平滑前的排布更加的紧密规整。
贪婪三角化重构的齿轮测量误差分析:
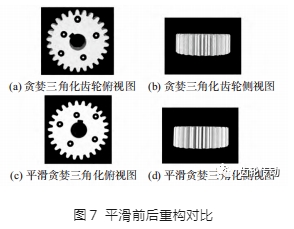
采用贪婪三角化算法进行齿轮三维点云重构,其中,图 7(a)、图 7(b)为直接利用贪婪投影三角化方法重构的齿轮三维模型,该模型孔洞明显减少,但模型表面仍然存在诸多噪点,表面粗糙度较高。图 7(c)、图 7(d)为平滑后利用贪婪投影三角化算法重构齿轮三维模型,由图可知平滑后的齿轮表面重构效果更好。
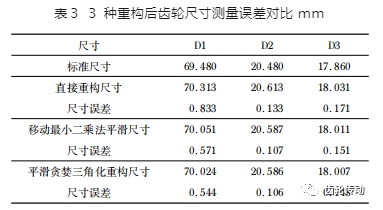
利用直接重构、移动最小二乘法平滑直接重构、平滑加贪婪三角化方法重构 3 种方法得到的齿轮 D1、D2、D3 尺寸测量结果及其测量误差如表 3 所示,经对比可知,平滑加贪婪三角化方法重构的齿轮尺寸比其他 2 种方法测量误差小。
四、结论
本文分析了双目视觉系统提取的齿轮初始三维点云特点,分别采用直通滤波和体素栅格滤波去除了齿轮初始三维点云数据存在的离群点与冗余点;研究了基于移动最小二乘法平滑加贪婪三角化算法的齿轮三维重构方法。搭建了双目视觉齿轮测量系统实验平台,开展直齿圆柱齿轮测量实验,通过齿轮三维点云数据处理与模型重构,分析了齿轮参数尺寸测量结果及其误差。实验结果表明:采用移动最小二乘法平滑加贪婪三角化算法重构后的齿轮三维模型表面平滑,边缘清晰,其 D1 尺寸测量误差由 0.833 mm 降至 0.544 mm,D2 由 0.133 mm 降至 0.106 mm,D3 由 0.171 mm 降至 0.148 mm,解决了齿轮三维点云重构模型表面粗糙问题,有效提高了齿轮三维点云的重构精度。
参考文献略.
上一篇:齿面波纹度形成原理及检测分析
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号










 网站客服
网站客服