时间:2024-09-18来源:北京精密 作者:江山
创新研究3:谐波齿轮的啮合性能与传动性能研究3.1 啮合刚度与啮合力
谐波齿轮有多达40%以上的齿对处于啮合状态,多齿对间啮合力求解是高度非线性接触问题。为揭示柔轮结构对其啮合点周向刚度的影响规律,课题组提出柔轮啮合点周向刚度的理论计算方法。将周向力引起的柔轮啮合点变形拆分为筒体变形和齿体变形,推导周向力作用下柔轮杯底、光筒、齿圈和圆弧过渡部分的扭转变形及轮齿的弯曲和齿根转动的理论公式,并基于周向位移等效折算柔轮啮合点周向刚度(图9a、b)。提出空间啮合齿面间的负载侧隙和啮合力的理论迭代算法(图9c)。基于负载工况下柔轮的周向刚度矩阵和真实齿廓参数计算空载齿间侧隙分布,迭代计算负载侧隙和啮合力分布(图9d-f)。
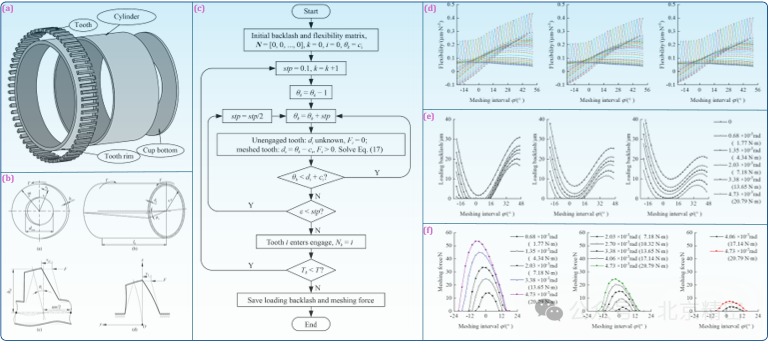
图9 谐波齿轮啮合力的计算:(a) 柔轮结构离散模型; (b) 柔轮扭转刚度的离散计算; (c) 基于动态啮合侧隙和刚度矩阵的啮合力计算方法; (d) 柔轮的啮合柔度结果; (e) 动态啮合侧隙结果; (f) 啮合力结果.
3.2 齿圈应力
齿圈变形引起的弯曲应力是导致柔轮高周疲劳失效的主要因素之一。轮齿结构引起的刚度变化和应力集中效应对齿圈应力具有显著且复杂的影响。为探究轮齿参数对齿圈弯曲刚度和应力集中的影响,揭示齿圈应力随轮齿参数的变化规律,课题组基于考虑了齿根圆弧的连续变厚度齿条模型研究了刚度系数和应力集中系数对齿高、齿厚、壁厚和齿根圆角半径的敏感性。结果表明除齿高外,齿厚、壁厚和齿根圆角半径对刚度系数和应力集中系数都有显著的影响(图10a)。进而,以壁厚为基本量,对齿厚和齿根圆角半角无量刚化,并通过正交仿真实验研究了刚度系数和应力集中系数以及二者乘机所得的轮齿应力系数的变化规律。最终通过构建空间平/曲面方程拟合了刚度系数、应力集中系数和轮齿应力系数的经验公式,所得经验公式所表达的曲面与正交仿真实验结果基本吻合(图10b)。
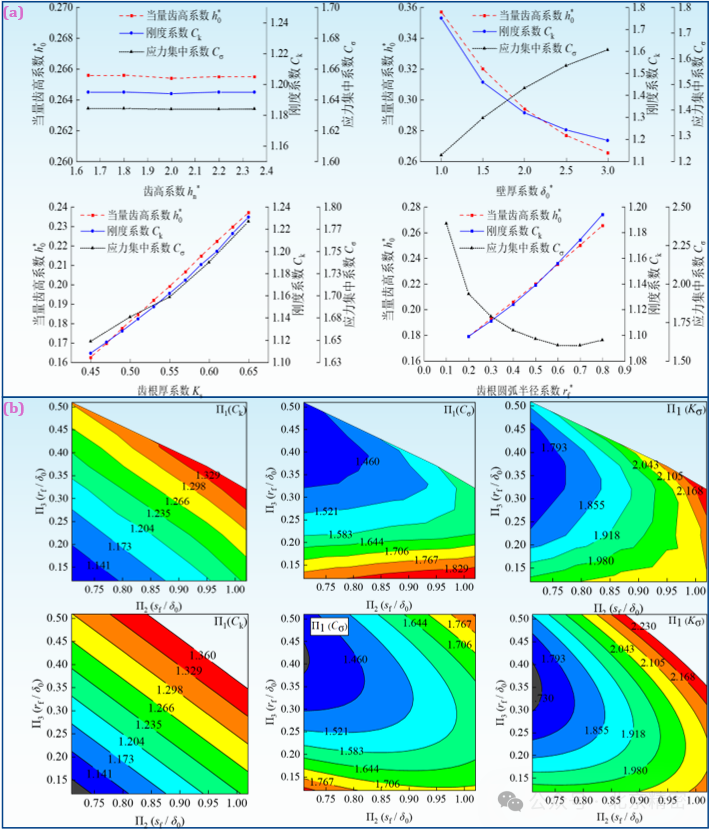
图10 齿圈结构参数对齿圈应力系数的影响:(a) 齿圈应力各系数对齿高、壁厚、齿厚和齿根圆角半径的敏感性结果; (b) 齿圈刚度系数、应力集中系数和轮齿应力系数的分布规律.
3.3 基于虚拟样机的扭转刚度研究
谐波齿轮减速器具有的薄壁柔轮、柔性轴承和高达数百的小模数轮齿为整机建模提出了巨大的挑战。为建立能够反映真实工况的有限元虚拟样机,课题组以高精度计算、易于收敛为目标,对凸轮、柔性轴承、柔轮和刚轮进行了精确建模,对网格进行了分区域跨尺度划分,在滚珠与轴承层沟道、轮齿等接触部位划分了细密的结构化六面体网格(图11a-c)。由内至外建立了凸轮-轴承内环-滚珠-轴承外环-柔轮-刚轮的五级非线性接触,考虑了不同的接触关系的摩擦状态,合理的选择了摩擦系数。
课题组基于谐波减速器的有限元虚拟样机,固定凸轮时在输出端施加扭矩载荷,获得了齿面的接触比压(图11d),揭示了齿面的实际接触区域,获得了齿面承担负载的位置。同时该有限元虚拟样机模型能够较为准确的反映谐波齿轮减速器的整机扭转刚度特性(图11e)。同时,课题组通过对有限元虚拟样机施加不同大小的扭矩载荷,观察了柔轮在负担不同大小扭矩载荷下的变形。结果显示,在承担较小载荷时,啮入区的间隙基本就已经被消除,啮出区产生了不显著的畸变,随着负载的增大,柔轮的畸变也逐步显著起来。
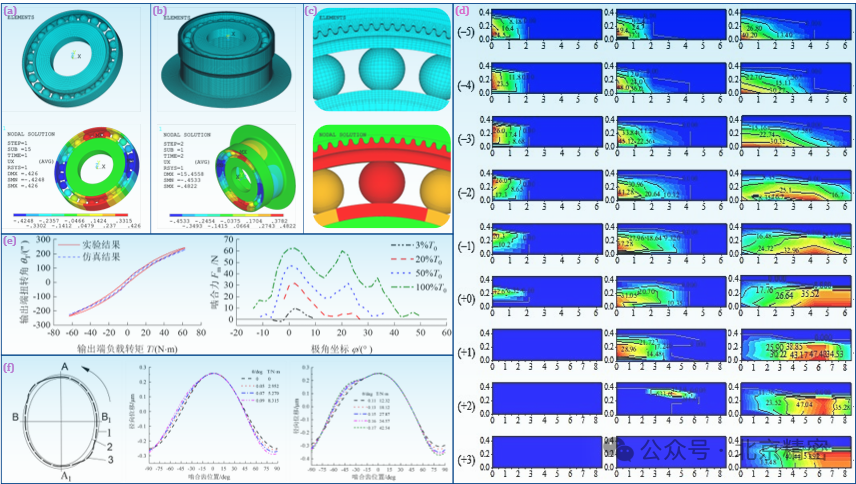
图11 有限元虚拟样机及啮合性能高分析:(a-c) 有限元虚拟样机; (d) 啮合齿面间的接触比压分布; (e) 整机扭转刚度; (f) 负载工况下柔轮的径向变形位移.
3.4 谐波减速器传动误差频谱分析
谐波齿轮的多齿共轭啮合状态和柔轮的薄壁弹性结构能够在一定程度上均衡轮齿的制造误差所带来的影响。但工程实际中,谐波减速器的传动误差依然是一个显著的问题。为了改善工程实践中谐波减速器的传动精度,课题组对其传动误差进行了溯源(图12a、b)和频谱分析(图12c),研究了凸轮、柔轮和刚轮的制造及安装误差对整机传动误差的影响。并基于波形叠加原理,揭示了传动误差中纺锤、波浪等宏观形貌的产生机理(图12d),可以为快速定位问题零部件,提出改善方案提供一定的理论支撑。
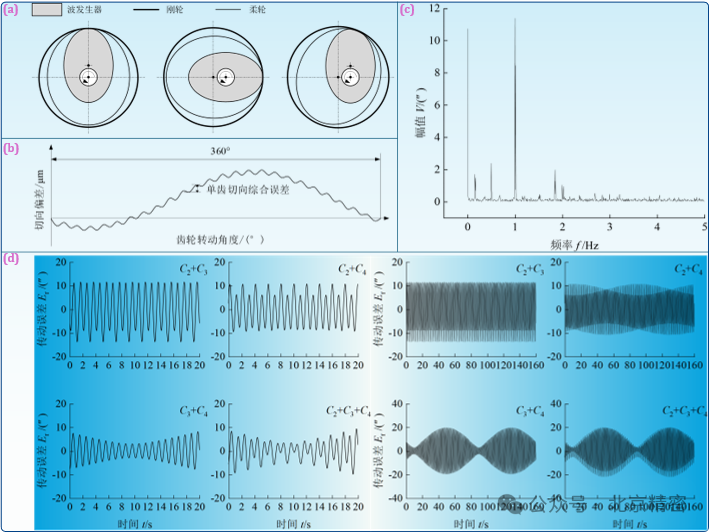
图12 谐波减速器的传动误差:(a-b) 误差溯源分析; (c) 误差信号的频谱分析; (d) 误差主频信号的叠加特性.
标签: 齿轮传动
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号






 网站客服
网站客服