时间:2023-10-16来源:振动、测试与诊断 作者:包文杰等
提出了一种基于快速路径优化的自适应短时傅里叶变换时频分析方法,并将该方法用于行星齿轮箱的故障诊断。该时频分析方法通过使用快速路径优化获得瞬时频率变化规律,在短时傅里叶变换过程中自适应的改变时窗长度,从而获得更恰当的时频分辨率。针对行星齿轮箱运行状态不稳定的特点,通过使用笔者提出的时频分析方法可以有效地提取出行星齿轮箱的转速信息,利用参考转速对故障信号角度域重采样和阶次分析,从而实现变转速情况下的行星齿轮箱故障诊断。仿真分析表明,与传统短时傅里叶变换相比基于快速路径优化的自适应短时傅里叶变换得到的时频分布能量更加集中;试验分析证明了基于快速路径优化的自适应短时傅里叶变换方法在行星齿轮箱故障诊断中的有效性。
行星齿轮变速箱具有传动比大、承载能力强等优点,在现代工业中得到广泛应用。它们一般在重载和恶劣的工作环境下工作,其关键部件包括太阳齿轮、行星齿轮及齿圈等,都会出现严重的点蚀和疲劳裂纹。
近年来,许多研究者对行星齿轮变速箱的故障诊断做出了大量贡献。其中,一批学者通过动力学建模与分析研究出齿轮故障、制造误差和负载对齿轮箱振动响应的影响。Lei等提出了统计指标为常数情况下的行星齿轮箱状态监测方法。Bartel- mus等提出了非平稳运行状态下的行星齿轮箱状态监测。Feng等总结出行星齿轮箱振动信号的特征频谱。然而,行星齿轮变速箱一般用于类似风力发电机组这类运行状态不稳定的情况,此类情况下,行星齿轮箱振动信号特征为非平稳特征。在非平稳条件下提取行星齿轮变速箱的时变故障信息较为困难。时频分析方法因为能有效地揭示时变特征,而常被用于提取非平稳信号的故障信息。时频分析提供了一种可用并且强大的方法用于提取包含重要物理参数的非稳态信号的瞬时频率特征。关于瞬时频率估计的方法,已经有了大量的研究,其中基于时频分布的瞬时频率估计方法在处理严重噪声信号方面具有出色的特性和稳定性,因此近几年获得了大量的关注。
为了对瞬时频率的特征做精确的估计,能否获得高的时频分辨率被认为是衡量时域分析方法的关键。有3种传统的时频分析方法,即短时傅里叶变换、连续小波变换和魏格纳分布。短时傅里叶变换和连续小波变换应用于线性时频分析领域,这两种方法通过内积来处理信号,并且可以定位时间和频率。然而,根据海森伯格不确定原理,这两种方法都不能同时获得任意高的时频分辨率。因此可以认为,这些方法在保持良好时间分辨率时仅能保证较低的频率分辨率,反之亦然。笔者提出的基于快速路径优化的自适应短时傅里叶变换(adaptiveshort timefouriertransform,简称 ASTFT)方法,希望通过快速路径优化方法获得瞬时频率变化规律来改变时窗长度,从而获得更恰当的时频分辨率。在此基础上,再次通过使用快速路径优化方法来提高瞬时频率估计的准确性。
一、基本原理
ASTFT方法:传统短时傅里叶变换的时频窗时宽是固定不变的,但大多数工程信号的瞬时频率变化规律并不恒定,使用时窗固定的短时傅里叶变换处理此类信号效果必然不好。
自适应短时傅里叶变换的时窗长度随瞬时频率的斜率(即瞬时频率的一阶导数)变化而改变,在瞬时频率较大时使用短时窗的时频核函数,以取得较高的时间分辨率;在瞬时频率的斜率较小时使用长时窗的视频核函数,以取得较高的频率分辨率。
对于一个纯频率调制信号,例如:s(t)=eif(t) ,Co- hen给出的最优时窗长度和瞬时频率斜率的关系如下
其中:f′(t)为瞬时频率的一阶导数。
当对信号s(t)采用变窗高斯核函数的短时傅里叶表达式时,时窗长度 Tt 和时变的标准差σ(t)之间的关系为
结合式(1)和式(2)可以推出
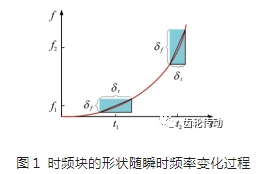
因此,当时频核函数的标准差参数σ(t)按照式(3)取值时,变窗高斯核函数的短时傅里叶变换将会得到最优分辨率。举例说明时频分辨率与瞬时频率变化关系如图1所示。图1中:红线为频率随时间变化的时频脊线;横坐标为时间t;纵坐标为频率 f;图中矩形为时频块。从图中可以看出时频块的形状随瞬时频率斜率变化过程,当瞬时频率的斜率变大时,时频块的高度δf 变大,宽度δt 变小,时间分辨率变高而频率分辨率变低。
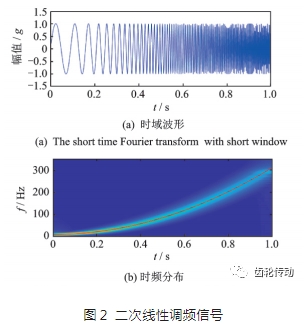
基于快速路径优化的脊线提取: 参考文献给出了脊线的定义。如 图 2 所示,使用短时傅里叶变换分析了一个二次线性调频信号,左侧为信号时域波形,右侧为信号时频分布图,图中红色部分是时频矩阵的极大值序列,其包含了大部分的振动能量,通常被认为是时频分布的脊线。信号由式(4)扫频得到
其中:瞬时频率为f(t)=10+300t2。
文献中给出了一些脊线提取的方法,然而大多数方法无法准确恢复能和信号真实瞬时频率相匹配的脊线。例如,基于瞬时频率估计的多项式线性调频小波变换方法在处理严重噪声信号时效果并不好。最明显的原因是它只考虑时频分布中每一离散点的最大幅值。所以,笔者采用了一种包含快速路径优化(afastpathoptimization,简称 FPO)的瞬时频率提取方案。该脊线提取方案的具体步骤与原理如下:
1)使用时频变换方法计算信号的时频分布矩阵,得到每一时刻的幅值极大值 En(t),及其对应的频率 Pn(t)
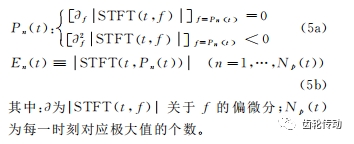
2)通过使用Pn(t)的相邻节点 Pn(t)+Δf 和 Pn(t)-Δf 的二次插值对Pn(t)进行修正。优化方案如下
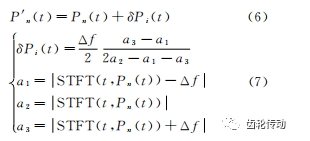
其中:Δf 为时频矩阵的频率分辨率;Pn由式(5)计算得出。
3)通过对相邻时刻极大值点对应频率的差值进行惩罚,构造极大值点Pn(tm)的权重函数
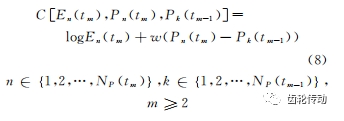
其中:w 为保证Pn(tm)与 Pk(tm-1)之间连续性的惩罚因子
其中:fs 为采样频率;σ为高斯窗函数的参数。
因此,使用式(8)的权重函数构造路径优化函数如下
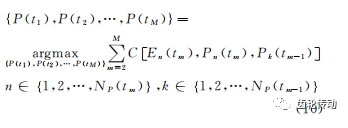
4)通过对上述构造的路径优化函数进行求解,得出t1~tm 时刻的最优组合{P(t1),P(t2),…, P(tM )},即为所提脊线。
相对于一些瞬时频率估计方法,此方案有3个优点:①使用二次插值定位幅值极大值的频率更加的精确;②用来提取脊线的路径优化函数不仅考虑到脊线当前点的幅值大小,还考虑到脊线的连续性;③快速路径优化的脊线提取方法可以有效地避开随机噪点对所提脊线的干扰。
基于快速路径优化脊线的 ASTFT:自适应短时傅里叶变换能够根据瞬时频率的斜率自动调整时窗宽度,从而在瞬时频率斜率小的时 候保证较高的的频率分辨率,在瞬时频率斜率大的时候保证较高的时间分辨率。然而,在对原始信号做 ASTFT 之前,要先进行瞬时频率估计,以瞬时频率的斜率作为变化时窗的参考。本研究提出了使用时频分布的脊线来计算瞬时频率斜率,以此计算自适应短时傅里叶变换时所使用的变化时窗。其具体实现步骤为:
1)对原始信号进行短时傅里叶变换得到初步的时频分布S(t,f);
2)对S(t,f)进行基于快速路径优化的脊线提取得到f(t);
3)确定自适应短时傅里叶变换的标准差参数![]()
4)以σ(t)为标准差参数对s(t)进行自适应短时傅里叶变换得到 ASTFT(t,f)。
二、仿真信号分析
仿真信号构造:为验证所提方法在时频分析方面的有效性,构造仿真信号s(t)如下
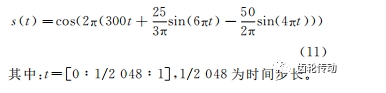
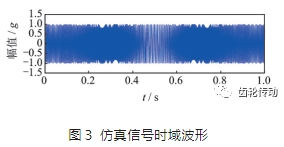
对信号进行时频分析前加入信噪比为 -1dB 的高斯白噪声。采样频率为2048Hz,时域波形如图3所示,其理论瞬时频率f(t)如下
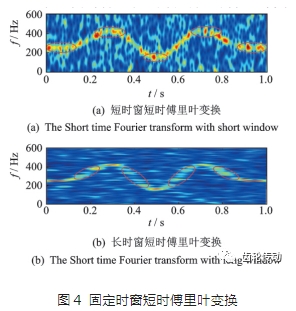
仿真信号分析:通过对s(t)做固定时间窗的短时傅里叶变换,可以看出,在瞬时频率斜率较大的时候(图4(a)中红圈部分),长时窗的短时傅里叶变换(高斯窗函数的标准差参数σ取0.004,σ越小时窗长度越长)效果较差,能量较分散;在瞬时频率斜率较小的时候(图4(b)中红圈部分),短时窗的短时傅里叶变换(高斯窗函数的标准差参数σ取0.04,σ越大时窗长 度越短)效果较差,能量不够集中。
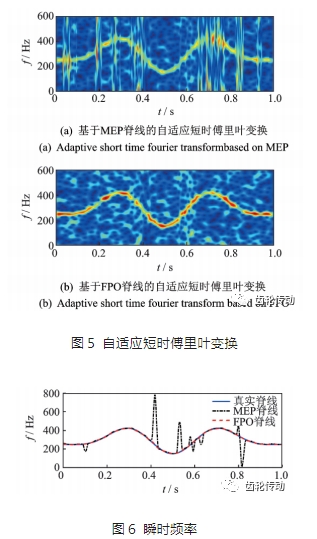
同时对s(t)做自适应短时傅里叶变换(高斯窗函数的标准差参数![]() ,如式(3)所示,f(t)为文中所提两种脊线方法得到的脊线), 结果如图5所示,相对图4中时频分布自适应短时傅里叶变换获得的时频分布能量更加集中。图 5(a)为基于最大能量峰值(maximumenergypeaks, 简称 MEP)的瞬时频率估计方法做自适应短时傅里叶变换所得时频分布,由于随机噪声干扰,瞬时频率出现很大的波动;图5(b)为笔者提出的基于快速路径优化脊线的自适应短时傅里叶变换所得时频分布,由于该方法可以有效降低随机噪声得干扰,得到的时频分布较为均匀、集中。为从图5中提取的瞬时频率与理论瞬时频率的比较,从图6可以看出,基于 FPO的瞬时频率估计结果更接近于理论瞬时频率。
,如式(3)所示,f(t)为文中所提两种脊线方法得到的脊线), 结果如图5所示,相对图4中时频分布自适应短时傅里叶变换获得的时频分布能量更加集中。图 5(a)为基于最大能量峰值(maximumenergypeaks, 简称 MEP)的瞬时频率估计方法做自适应短时傅里叶变换所得时频分布,由于随机噪声干扰,瞬时频率出现很大的波动;图5(b)为笔者提出的基于快速路径优化脊线的自适应短时傅里叶变换所得时频分布,由于该方法可以有效降低随机噪声得干扰,得到的时频分布较为均匀、集中。为从图5中提取的瞬时频率与理论瞬时频率的比较,从图6可以看出,基于 FPO的瞬时频率估计结果更接近于理论瞬时频率。
文中通过计算范数来衡量脊线的精确程度
其中:fTI为真实脊线频率;fEI为所提取脊线频率值。
经计算可得本算法所得脊线误差为0.0067,而使用 MEP脊线误差为0.0361,故本算法所提脊线远比 MEP算法脊线准确。
三、行星齿轮箱故障诊断
行星齿轮箱故障数据:本试验的振动数据采集自行星齿轮箱故障模拟试验台。如图7所示,试验台包括电机驱动、交流电机、行星齿轮箱、固定轴齿轮箱和制动器。转速传感器和加速度传感器分别采集电机轴转速和行星齿轮箱振动信号,电机轴转速可由电机驱动自由调节,本试验中电机为变转速,包括一段升速和一段减速过程。信号采样频率为12800Hz,采集时长16s。

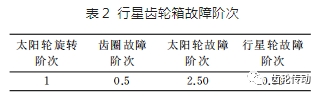
表1给出了行星齿轮箱的齿轮参数。由参考文献提供的星齿轮箱故障阶次计算公式如下
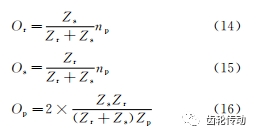
其中:Or,Os 和 Op 分别为齿圈、太阳轮、行星轮故障阶次;Zr,Zs 和Zp 分别为齿圈、太阳轮、行星轮齿数;np 为行星轮个数。
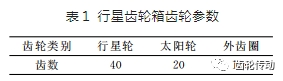
表2为将表1中参数带入式(14)~(16)计算得到的行星齿轮箱内各零件故障特征阶次表。
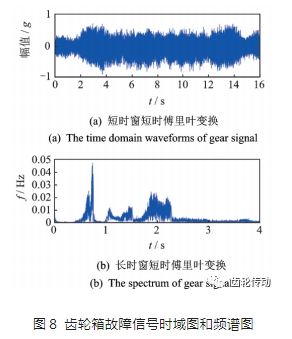
试验信号分析:通过对含有行星轮裂纹故障的振动信号进行阶次分析,从而验证该方法的有效性。行星齿轮箱故障数据的振动时域图和频谱图如图8所示。图8(a)为试验中直接采集的振动信息时域图,图8(b)为时域信号经傅里叶变换得到的频谱图,在频谱中出现了很多峰值,由于齿轮转速波动,很难将频谱图中的峰值与故障特征频率或者故障特征阶次联系起来。
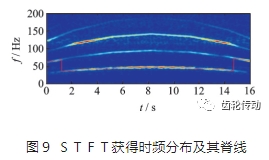
首先,对原始故障信号使用短时傅里叶变换获得信号的时频分布,并提取出信号中电机转速对应的瞬时频率,如图9所示,图中红线为使用基于快速路径优化的脊线提取方案获得的瞬时频率。
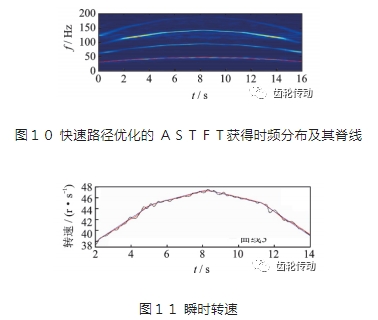
然后,再次对原始故障信号使用笔者提出的基于快速路径优化的自适应短时傅里叶变换获得新的时频分布,并提取出信号中电机转速对应的瞬时频率,如图10所示,图中红线为从此时频分布中提取的瞬时频率。通过对比,可以看出本方法获得的时频分布(见图10)优于传统短时傅里叶变换得到的时频分布(见图9)。将图9和图10中提出的瞬时转速信息与实际转速进行对比,如图11所示,图中曲线1为使用STFT 得到的转速;曲线2为本方法得到的转速;曲线3为实际转速。可以看出通过本方法获得的转速更加接近于真实转速,可以作为实际转速未知情况下行星齿轮箱故障信号角度域重采样的参考转速。
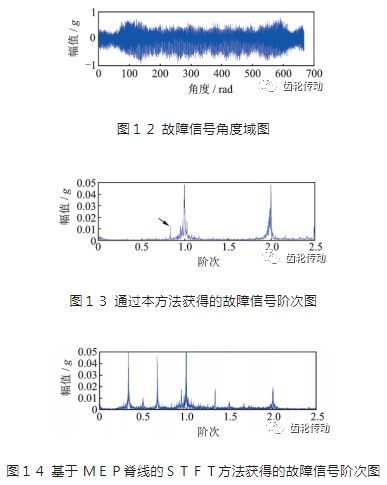
最后,利用获得的瞬时频率对故障数据重新进行角度采样,即将时域信号对转速进行积分从而得到角度域信号,如图12所示。然后对故障数据的角度域信号做阶次分析得到振动信号的阶次图,如图13所示。图中幅值较大的1阶为转频、2阶为2倍转频。对应表2可以在图13阶次中找到故障阶次,故障阶次为0.83阶,幅 值 为0.012g,故障阶次非常明显,从而验证基于快速路径优化的自适应短时傅里叶变换方法在实际应用中的可行性。同时添 加如下对比,以通过 MEP 方法获得的参考转速对信号做阶次分析,得到如图14所示阶次图,从图中很难判断出行星齿轮故障阶次。
四、结束语
基于快速路径优化的自适应短时傅里叶变换方法依据快速路径优化方法获得的瞬时频率规律变换时频窗长度,使自适应短时傅里叶变换能够获得更加优化的时频分布,从而在下一次的脊线提取过程中获得更加准确的瞬时频率估计结果。通过对比仿真信号的处理结果,可以清晰地看出在处理瞬时频率斜率变化较快的信号时,笔者提出的基于快速路径优化的自适应短时傅里叶变换要优于传统的短时傅里叶变换方法。通过使用此方法处理取自行星齿轮变速箱的非平稳信号,根据快速路径优化脊线提取方案获得的齿轮箱瞬时转速对原始故障信号重新进行角度采样,对角度域故障信号做阶次分析,得到明显的特征阶次。通过对试验信号的分析证明了基于快速路径优化的自适应短时傅里叶变换方法在行星齿轮变速箱故障诊断上的有效性。
参考文献略.
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号









 网站客服
网站客服