时间:2022-10-20来源:第十五届中国CAE工程分析技术年会论文集 作者:吴素珍等
针对工业机器人用渐开线少齿差行星齿轮易发生接触疲劳,影响齿轮传动性能和使用寿命的特点,以我国自主研发的某工业机器人关节减速器齿轮副为研究对象,分析不同工况下渐开线少齿差行星齿轮应力应变特性。采用赫兹理论建立其数学模型,求解额定负载、极限负载、轻载三种工况下传动齿轮的理论应力应变;考虑齿宽、齿隙和表面粗糙度等因素,建立传动齿轮副精确实体模型,基于有限元法分析同等条件下齿轮的接触应力应变;理论计算和有限元法结果对比分析,两者具有很好的一致性。相关研究内容为其工业应用提供理论依据和应用价值。
机器人用关节用精密减速器主要有谐波减速器和摆线针轮RV减速器,其中谐波减速器采用的是柔轮结构,刚性偏弱,不可避免地影响机器人的动态特性和抗冲击能力;RV减速器对制造误差敏感,制造成本高,高精度、高难度、高成本制约着RV1传动的发展。为解决上述问题,自主研发了工业机器人用渐开线少齿差行星齿轮传动机构。渐开线少齿差行星齿轮传动机构是类似RV传动机构,也是一种两级行星减速传动机构,不同之处为第二级少齿差行星齿轮代替了摆线针轮,使其既具有RV减速器的优势,又避免了摆线轮难加工的特点。渐开线少齿差齿轮在传动过程中,接触表面在交变载荷不断作用下,接触表面会出现小针状或痘状凹坑,从而影响传动精度和疲劳寿命。为此,探析机器人用关节用少差差齿轮在传动过程产生接触疲劳机理是亟待解决的问题,为完善齿轮设计理论与方法提供重要依据。
近年来国内外学者关于渐开线少齿差齿轮机构做了一系列研究。罗瑜等人以行星减速装置为研究对象,分析了齿轮齿面接触疲劳强度,通过接触应力理论分析验证了有限元方法的可行性;王海龙、吴素珍以齿轮箱齿轮副为研究对象,对齿轮啮合部位进行静力学和瞬态动力学分析,理论计算结果和仿真分析值基本一致,验证了设计可靠性;翟聪、Wu以转臂轴承受力最小为优化目标,对渐开线少齿差传动行星减速器的优化设计,同时利用有限元软件对减速器箱体和双联行星齿轮进行了静态力学分析和模态分析;李兵等人以RV减速器为研究对象,建立了传动误差分析模型,展示了样机工作时的误差传递过程,也反映了在齿轮有限元分析过程中考虑齿轮间隙的必要性;戴翎等研究了混合润滑下少齿差行星传动短齿啮合对齿轮接触疲劳的影响,并对轮齿接触疲劳寿命进行了预测。从以上文献可以看出,针对行星齿轮做了一系列研究,但面向工业机器人用的渐开线少齿差传动齿轮副齿面接触分析还不够充分。
本文综合考虑轮齿接触宽度、齿侧间隙和齿面粗糙度等因素,采用赫兹理论计算了渐开线少齿差齿轮副的接触应力;基于Solidworks建立了渐开线少齿差齿轮副精确三维模型,利用有限元法分析额定负载、极限负载、轻载工况下少齿差渐开线齿轮齿轮副应力应变,分析承受负载对齿轮接触强度得影响规律,理论计算和有限元结果对比分析,为渐开线少齿差齿轮副强度、可靠性及优化设计提供理论基础。
一、工作原理及基本参数
结构及工作原理
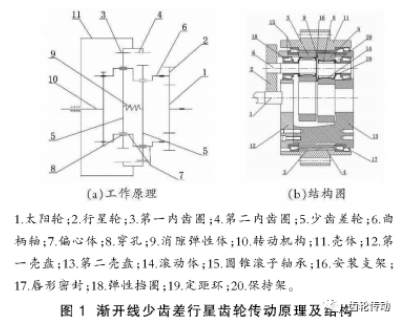
渐开线少齿差行星齿轮传动属于曲柄式封闭差动轮系,运动原理和结构如图1所示。它由第一级渐开线行星传动和第二级一齿差渐开线行星传动组成,运动由中心轮1输入,中心轮带动行星轮2行星传动,行星轮一边公转,同时又绕自身轴线自转,行星轮自转通过固联的曲柄轴6输出,成为第2级一齿差行星传动的输入,带动少齿差齿轮5转动,少齿差轮与内齿圈3有一定的偏心,由于偏心少齿差轮与内齿圈啮合传动时,少齿差轮5—边随曲柄轴公转,一边绕自身轴线自转,其自转通过输出机构10输出。
基本参数
本文以自主开发的工业机器人用少齿差行星齿轮为例进行的齿轮接触应力计算及分析,该机构少齿差级输入转矩为1000N・M,齿轮材料为18CrN- iMo7-6渗碳淬火,弹性模量E=2. 06X105MPa,泊松比=0.3,密度7.85X 103kg/m3。渗碳淬火后其齿面硬度可达58~62HRC,芯部硬度可达30〜45HRC。其相关基本技术参数如表1所示。

二、理论计算
渐开线少差行星齿轮传动过程中,相啮合齿轮副齿面主要承受法向力Fn。由于齿轮受圆周力Ft的影响,传动过程中行星齿轮齿面易产生接触疲劳破坏,该破坏是工业机器人减速器失效的主要因素。
利用Herts理论建立起渐开线少齿差齿轮传动的数学模型,进行理论分析计算。根据赫兹公式,可知接触应力计算如下:

式中:σH—接触应力;FN—齿轮受力;L一接触线的长度;PΣ一综合曲率半径,![]() ;ZE一弹性影响系数,
;ZE一弹性影响系数,
齿面承受法向载荷为:

式中:T一输入转矩;d1一行星轮分度圆直径;a一压力角;
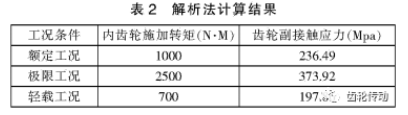
为分析减速器齿轮副应力变化规律和校核齿轮齿面承载能力,计算减速器额定工况、极限超载和轻载工况三种情况下齿轮副赫兹应力,对内齿轮齿圈分别施加1000N・m(额定载荷)2500N・m(极限载荷)、轻载700N・m(轻载)。由式(1)得各工况下齿轮副的接触应力,计算结果如表2。
三、少齿差行星齿轮副接触强度有限元分析
有限元法可以快速、有效的解决工程上的非线性问题,现有的线性理论已远远不能满足设计的要求,如大应变和塑形。少齿差行星齿轮副接触强度分析既要考虑几何非线性、接触非线性等非线性问 题,为此,采用有限元法开展少齿差齿轮副接触应力应变分析,研究齿轮副啮合时应力应变和沿齿宽方向齿面应力分布规律。
几何模型建立
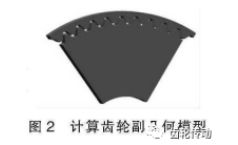
基于渐开线齿轮啮合原理和加工原理,建立少齿差行星齿轮齿轮副,建立三维模型时曲线误差设置为0. 1μm以下;少齿差齿轮传动采用两个完全相同,位置正好相差180°渐开线行星齿轮与内齿 圈啮合,在少齿差传动过程中,两行星齿轮受力周期和大小完全一样,为此对一片行星论和齿圈的接触特性就行分析,模型中留了 一片行星轮,主要分析齿轮副啮合部位的应力,同时为提高计算效率,去除了齿轮副的倒角等小结构,综合考虑计算精度与计算率,采用了9对齿进行了计算,计算的齿轮副几何模型如图2所示。
有限元模型建立
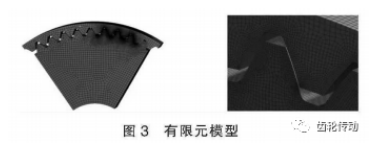
网络划分与材料属性设置:本模型采用了“ solid 187元“,“solid 187 单元”是高阶3维10节点固体结构单元,每个节点有X、Y、Z方向平移的自由度,单元支持塑形、超弹性、蠕变、应力刚化和大应变能力同时,该单元具有二次位移模式可以更准确的模拟模型,可以避免由于通过不同CAD建模相互转化差生的误差。该行星齿轮传动的齿廓要精度高,划分网格时采用了较小的网格,对齿面接触区域采用0. 1mm的精密网格单元,其他部分采用了 0. 3mm网格,划分后的有限元模型如图3所示。本模型共形成2924367个节点,804165个单元。
在Engineering data模块中进行材料属性的设置,齿轮材料为18CrNiMo7-6,为此,设置弹性模量 2.06×105MPa,泊松比0.3,密度7.85×103Kg/m3。
接触对的设置:齿轮的齿面接触问题是一种非线性问题,接触类型为面面接触,在workbench中接触对的设置类型分为五类,即 Bonded、No separation、Friction- less、Frictional、Rough,本文分析采用齿轮副有摩擦接触类型:Frictional,摩擦因数选择0. 01。依据接触对的选择原则,选择大齿轮为目标面,小齿轮为接触面,其他选项选择软件默认设置。
施加约束及载荷:行星轮与内齿圈传动过程中、内齿圈固定,行星轮一边公转一边反向自转。本模型分析行星齿轮传动为某一个瞬间的接触应力,在瞬时状态,内齿轮的公转速度很小,所以可以近似看成只有行星齿轮的自转,为此,施加约束时内齿圈齿轮采用全约束,行星轮约束5个自由度,留一个绕自身转动的自由度;在行星齿轮中心建立参考点,建立参考点与行星齿轮体的节点刚性耦合,在中心点施加转矩载荷,载荷大小分别为1000N・m(额定工况)、2500N・m (极限载荷)、轻载700N(轻载)三种载荷,分别对三种工况下的有限元模型就行计算分析。
四、结果分析与讨论
通过额定负载、极限负载、轻载三种工况有限元计算,得到渐开线少齿差行星齿轮传动齿轮副的接触应力应变图如图4〜图7所示。
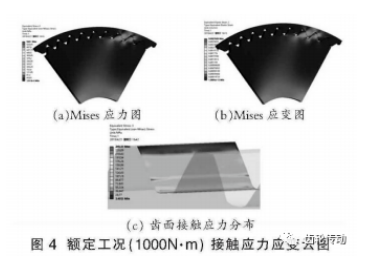
由图4可以得到,额定工况下齿面最大接触应力为245. 37MPa,最大接触应变为0. 0028mm,传动过程中有2齿接触,齿轮应力最大处出现在齿根部位,齿面接触出现了双线,应力分布特性一条在齿根处一条在啮合处,齿面接触沿齿宽方向基本均匀,但出现了沿齿宽方向两侧应力稍大,可能由于边缘效应,边缘部分刚度较弱,在受力后率先进行啮合接触状态,从而产生了应力集中,可以通过齿宽修向等方式进行消除。
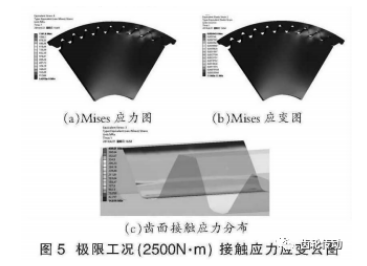
由图5可以得到,极限工况下齿面最大接触应力为409. 01MPa,最大接触应变为0. 0055mm,齿轮最大应力出现位置和齿面接触特性与额定工况下具有一致性,而在限载荷下齿根部位应力激增,但符合预期值,且小于许用接触应力,在安全范围内。
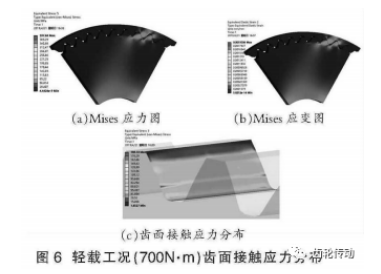
从图6可以得出,轻载工况下,减速器齿轮副齿面最大接触应力为189. 72Mpa,最大接触应变为 0. 0019mm,齿轮最大应力出现位置和齿面接触特性与额定工况下具有一致性。通过三种工况分析可得,工作负载没能改变接触应力应变规律,但对最大应力影响较大。
赫兹理论和有限元法两种方法计算的接触应力进行了对比,如图7所示,随施加载荷变化,两种方法计算的接触应力变化规律具有一致性,但有限元计算和理论计算相对于存在一定的误差,最大误差为8%,证明了有限元模型的正确性和有效性。

五、结论
(1) 利用赫兹理论和有限元法,分别对计算了额定工况、极限工况和轻载三种工况下少齿差行星齿轮副啮合的接触应力应变,计算结果显示,随着负载的增大,接触应力应变快速增大,从而易引起疲劳破坏。
(2)少齿差传动齿轮副的有限元分析结果显示应力分布为双线,一条在齿根处一条在啮合处,齿宽边缘处应力较大,应力向中间逐步扩散,且应力在齿宽中部基本均匀。
(3)赫兹理论与有限元法计算的少齿差行星齿轮接触应力规律是一致的,证明了简化模型计算少齿差行星齿轮接触强度的有效性和正确性,为少齿差传动机构的快速设计,强度计算提供了理论指导。
免责声明:凡注明(来源:齿轮头条网)的所有文字、图片、音视和视频文件,版权均为齿轮头条网(www.geartoutiao.com)独家所有,如需转载请与本网联系。任何机构或个人转载使用时须注明来源“齿轮头条网”,违反者本网将追究其法律责任。本网转载并注明其他来源的稿件,均来自互联网或业内投稿人士,版权属于原版权人。转载请保留稿件来源及作者,禁止擅自篡改,违者自负版权法律责任。
相关资讯
网站简介 | 会员服务 | 联系方式 | 帮助信息 | 版权信息 | 网站地图 | 友情链接 | 法律支持
齿轮头条网--齿轮与先进制造业的“全媒体”综合资讯平台
 客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
客服热线:010-88438553
销售热线:18611505795/18611500535/18611505587
新闻热线:18611505788
鑫格尔传媒(北京)有限公司 geartoutiao.com Copyright ©2020-2025,All Rights Reserved 版权所有 不良信息举报中心 | 京ICP备 18007354号-2 | 京公网安备 11011202002671号





 网站客服
网站客服